3次元の位置ベクトルを表す構造体. [詳解]
#include <math_vector3.h>
公開メンバ関数 | |
| constexpr | Vector3 () |
| < デフォルトコンストラクタ.(0,0,0)で初期化される. | |
| constexpr | Vector3 (const float x_pos, const float y_pos, const float z_pos) |
| constexpr | Vector3 (const Vector3 &other)=default |
| コピーコンストラクタ. | |
| constexpr | Vector3 (Vector3 &&other) noexcept=default |
| ムーブコンストラクタ. | |
| constexpr Vector3 & | operator= (const Vector3 &other)=default |
| 代入演算子. | |
| ~Vector3 ()=default | |
| constexpr bool | operator== (const Vector3 &v) const noexcept |
| 2つのベクトルが等しいかどうかを返す.誤差を許容する. | |
| constexpr bool | operator!= (const Vector3 &other) const noexcept |
| bool | operator< (const Vector3 &other) const noexcept |
| bool | operator> (const Vector3 &other) const noexcept |
| bool | operator<= (const Vector3 &other) const noexcept |
| bool | operator>= (const Vector3 &other) const noexcept |
| constexpr Vector3 | operator+ () const noexcept |
| constexpr Vector3 | operator- () const noexcept |
| constexpr Vector3 | operator+ (const Vector3 &other) const noexcept |
| constexpr Vector3 | operator- (const Vector3 &other) const noexcept |
| constexpr Vector3 | operator* (const float num) const noexcept |
| constexpr Vector3 | operator/ (const float num) const |
| Vector3 & | operator+= (const Vector3 &other) noexcept |
| Vector3 & | operator-= (const Vector3 &other) noexcept |
| Vector3 & | operator*= (const float num) noexcept |
| Vector3 & | operator/= (const float num) |
| constexpr float | GetSquaredLength () const noexcept |
| ベクトルの長さの2乗を返す. | |
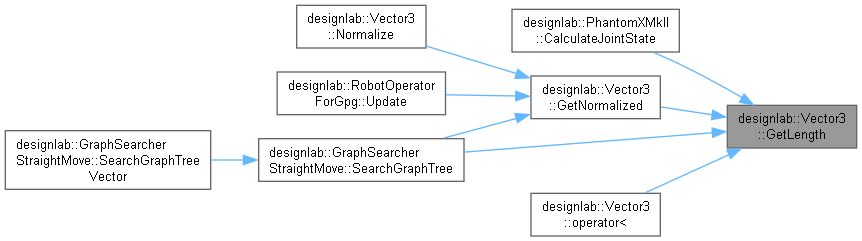
| float | GetLength () const noexcept |
| ベクトルの長さを返す. | |
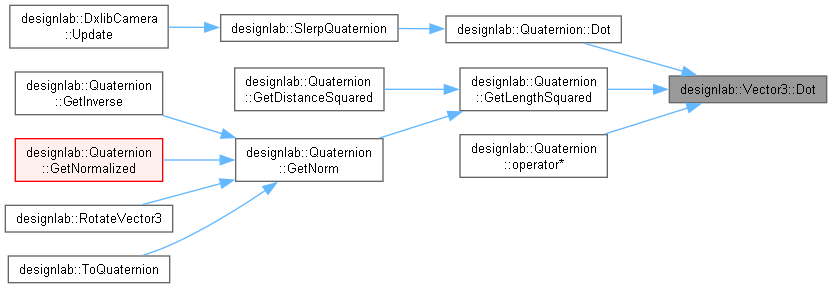
| constexpr float | Dot (const Vector3 &other) const noexcept |
| 自分・引数 の内積の結果を返す. | |
| constexpr Vector3 | Cross (const Vector3 &other) const noexcept |
| 自分×引数 の外積の結果を返す. | |
| float | GetDistanceFrom (const Vector3 &other) const noexcept |
| 別のベクトルと,このベクトルの距離を返す. | |
| Vector3 | GetNormalized () const noexcept |
| 単位ベクトルを返す. normalizeとは,ベクトルを正規化(単位ベクトルに変換)する操作を表す. 絶対値が0のベクトルの場合,そのまま0ベクトルを返す. | |
| constexpr bool | IsZero () const noexcept |
| x,y,zともに絶対値が0ならば true を返す. | |
| void | Normalize () noexcept |
| このベクトルを正規化する. 絶対値が0のベクトルの場合,そのまま0ベクトルになる. | |
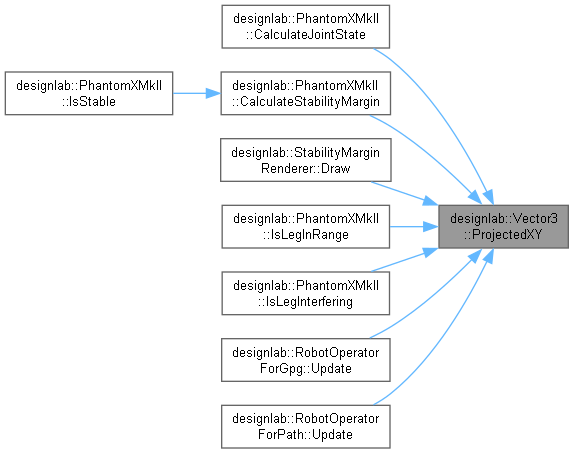
| constexpr Vector2 | ProjectedXY () const noexcept |
| XY平面に射影したベクトルを返す. | |
| std::string | ToString () const |
| このベクトルを文字列にして返す. (x, y, z) の形式,小数点以下3桁まで. | |
| std::string | ToCsvString () const |
| このベクトルをCSV形式の文字列にして返す. x, y, z の形式,小数点以下3桁まで. | |
静的公開メンバ関数 | |
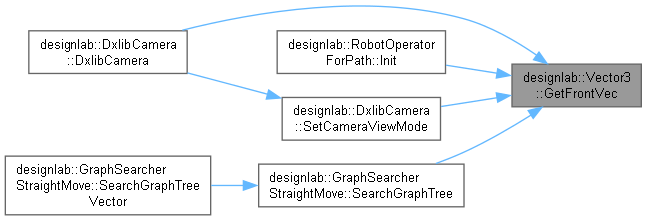
| static constexpr Vector3 | GetFrontVec () noexcept |
| 正面に進む単位ベクトルを返す. 静的な関数なので,Vector3::GetFrontVec() と呼び出せる. | |
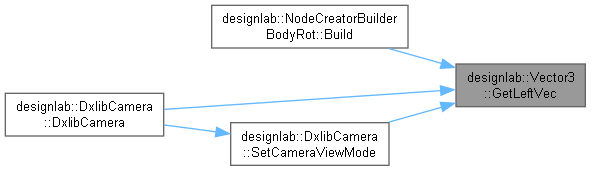
| static constexpr Vector3 | GetLeftVec () noexcept |
| 左に進む単位ベクトルを返す. 静的な関数なので,Vector3::GetLeftVec() と呼び出せる. | |
| static constexpr Vector3 | GetUpVec () noexcept |
| 上に進む単位ベクトルを返す. 静的な関数なので,Vector3::GetUpVec() と呼び出せる. | |
| static constexpr Vector3 | GetZeroVec () noexcept |
| 零ベクトルを返す. 静的な関数なので,Vector3::GetZeroVec() と呼び出せる. | |
公開変数類 | |
| float | x |
| ロボットの正面方向に正. | |
| float | y |
| ロボットの左向きに正. | |
| float | z |
| ロボットの上向きに正. | |
詳解
3次元の位置ベクトルを表す構造体.
座標系はロボットの進行方向にXの正,ロボットの上向きにZの正, 右手座標系にYをとっている.
ヘッダファイル内に実装を書くのは個人的には避けたいのだが, constexpr関数を使う場合,このようにする必要がある. constexpr関数はコンパイル時に値を計算できることを, コンパイラに伝えるためのものである. (C言語のマクロのような動作ができる) 実行速度が大切なプロジェクトであるため,このように処理を記述する.
参考
- C++、constexprのまとめ https://qiita.com/KRiver1/items/ef7731467b5ca83850cb ( アクセス日 2024/2/29 )
- AB - 3.04.構造体>細かい話>コンストラクタ https://atcoder.jp/contests/apg4b/tasks/APG4b_ab?lang=ja ( アクセス日 2024/2/29 )
- 非クラス関数による演算子オーバーロード https://programming.pc-note.net/cpp/operator2.html ( アクセス日 2024/2/29 )
- 衝突判定編 http://marupeke296.com/COL_main.html ( アクセス日 2024/2/29 )
math_vector3.h の 39 行目に定義があります。
構築子と解体子
◆ Vector3() [1/4]
|
inlineconstexpr |
< デフォルトコンストラクタ.(0,0,0)で初期化される.
math_vector3.h の 42 行目に定義があります。
◆ Vector3() [2/4]
|
inlineconstexpr |
math_vector3.h の 44 行目に定義があります。
◆ Vector3() [3/4]
|
constexprdefault |
コピーコンストラクタ.
◆ Vector3() [4/4]
|
constexprdefaultnoexcept |
ムーブコンストラクタ.
◆ ~Vector3()
|
default |
関数詳解
◆ Cross()
自分×引数 の外積の結果を返す.
- 引数
-
[in] other 外積の掛け算:後ろのベクトル.
- 戻り値
- 外積の結果. このベクトル→引数へ回転する右ねじが進む方向のベクトルが出力される.
math_vector3.h の 160 行目に定義があります。

◆ Dot()
|
inlineconstexprnoexcept |
◆ GetDistanceFrom()
|
inlinenoexcept |
◆ GetFrontVec()
|
inlinestaticconstexprnoexcept |
正面に進む単位ベクトルを返す. 静的な関数なので,Vector3::GetFrontVec() と呼び出せる.
- 戻り値
- 正面方向の単位ベクトル,xの正方向.
math_vector3.h の 211 行目に定義があります。
◆ GetLeftVec()
|
inlinestaticconstexprnoexcept |
左に進む単位ベクトルを返す. 静的な関数なので,Vector3::GetLeftVec() と呼び出せる.
- 戻り値
- 左方向の単位ベクトル,yの正方向.
math_vector3.h の 217 行目に定義があります。
◆ GetLength()
|
inlinenoexcept |
ベクトルの長さを返す.
- 戻り値
- ベクトルの長さ.
- 覚え書き
- sqrt(ルートの計算)が重いので, GetSquaredLength でいいならそちらを使うべき.
math_vector3.h の 143 行目に定義があります。

◆ GetNormalized()
|
noexcept |
単位ベクトルを返す. normalizeとは,ベクトルを正規化(単位ベクトルに変換)する操作を表す.
絶対値が0のベクトルの場合,そのまま0ベクトルを返す.
- 戻り値
- 正規化されたベクトル.
math_vector3.cpp の 19 行目に定義があります。
◆ GetSquaredLength()
|
inlineconstexprnoexcept |
ベクトルの長さの2乗を返す.
- 戻り値
- x,y,zの値を2乗にして足し合わせたスカラー値.
- 覚え書き
- sqrt(ルートの計算)が重いのでこちらを使えるなら使うべき.
math_vector3.h の 134 行目に定義があります。
◆ GetUpVec()
|
inlinestaticconstexprnoexcept |
上に進む単位ベクトルを返す. 静的な関数なので,Vector3::GetUpVec() と呼び出せる.
- 戻り値
- 上方向の単位ベクトル,zの正方向.
math_vector3.h の 223 行目に定義があります。
◆ GetZeroVec()
|
inlinestaticconstexprnoexcept |
零ベクトルを返す. 静的な関数なので,Vector3::GetZeroVec() と呼び出せる.
- 戻り値
- 零ベクトル.
math_vector3.h の 229 行目に定義があります。

◆ IsZero()
|
inlineconstexprnoexcept |
x,y,zともに絶対値が0ならば true を返す.
- 戻り値
- 0ならば true そうでなければ false.
- 覚え書き
- 誤差を許容する.
math_vector3.h の 182 行目に定義があります。

◆ Normalize()
|
inlinenoexcept |
このベクトルを正規化する.
絶対値が0のベクトルの場合,そのまま0ベクトルになる.
- 注意
- この関数は,このベクトルの値を変更する. GetNormalized() は値を変更しない. 間違えないようにすること.
math_vector3.h の 197 行目に定義があります。

◆ operator!=()
|
inlineconstexprnoexcept |
math_vector3.h の 74 行目に定義があります。
◆ operator*()
|
inlineconstexprnoexcept |
math_vector3.h の 115 行目に定義があります。
◆ operator*=()
|
noexcept |
math_vector3.cpp の 64 行目に定義があります。
◆ operator+() [1/2]
|
inlineconstexprnoexcept |
math_vector3.h の 101 行目に定義があります。
◆ operator+() [2/2]
|
inlineconstexprnoexcept |
math_vector3.h の 105 行目に定義があります。
◆ operator+=()
math_vector3.cpp の 48 行目に定義があります。
◆ operator-() [1/2]
|
inlineconstexprnoexcept |
math_vector3.h の 103 行目に定義があります。
◆ operator-() [2/2]
|
inlineconstexprnoexcept |
math_vector3.h の 110 行目に定義があります。
◆ operator-=()
math_vector3.cpp の 56 行目に定義があります。
◆ operator/()
|
inlineconstexpr |
math_vector3.h の 120 行目に定義があります。
◆ operator/=()
| Vector3 & designlab::Vector3::operator/= | ( | const float | num | ) |
math_vector3.cpp の 72 行目に定義があります。
◆ operator<()
|
inlinenoexcept |

◆ operator<=()
|
inlinenoexcept |
math_vector3.h の 90 行目に定義があります。
◆ operator=()
◆ operator==()
|
inlineconstexprnoexcept |

◆ operator>()
|
inlinenoexcept |
math_vector3.h の 85 行目に定義があります。
◆ operator>=()
|
inlinenoexcept |
math_vector3.h の 95 行目に定義があります。
◆ ProjectedXY()
|
inlineconstexprnoexcept |
◆ ToCsvString()
| std::string designlab::Vector3::ToCsvString | ( | ) | const |
このベクトルをCSV形式の文字列にして返す.
x, y, z の形式,小数点以下3桁まで.
- 戻り値
- このベクトルをCSV形式の文字列にしたもの.
math_vector3.cpp の 41 行目に定義があります。
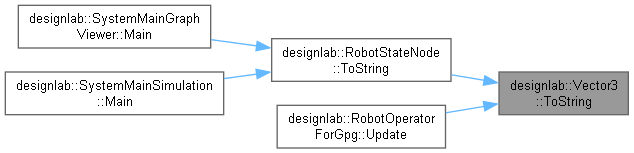
◆ ToString()
| std::string designlab::Vector3::ToString | ( | ) | const |
このベクトルを文字列にして返す.
(x, y, z) の形式,小数点以下3桁まで.
- 戻り値
- このベクトルを文字列にしたもの.
math_vector3.cpp の 33 行目に定義があります。

メンバ詳解
◆ x
| float designlab::Vector3::x |
ロボットの正面方向に正.
math_vector3.h の 243 行目に定義があります。
◆ y
| float designlab::Vector3::y |
ロボットの左向きに正.
math_vector3.h の 244 行目に定義があります。
◆ z
| float designlab::Vector3::z |
ロボットの上向きに正.
math_vector3.h の 245 行目に定義があります。
この構造体詳解は次のファイルから抽出されました:
- DesignLab/math_vector3.h
- DesignLab/math_vector3.cpp