名前空間 | |
| namespace | cmdio |
| namespace | com_func |
| 重心タイプに関する名前空間.Center of Mass Function の略. | |
| namespace | dxlib_util |
| Dxlibの3D表示を行う処理を書き直した関数をまとめた名前空間. | |
| namespace | enums |
| namespace | impl |
| 明示的に使用することのない関数をまとめた名前空間. | |
| namespace | leg_func |
| このプログラムでは脚状態をビット(28bit)の情報で表す. そのデータを処理するための関数. | |
| namespace | math_util |
| 基本的な計算を行う関数をまとめた名前空間. | |
| namespace | nostd |
| namespace | string_util |
| 文字列操作に関する関数を提供する名前空間. | |
| namespace | toml_func |
| tomlファイルのシリアライズ/デシリアライズを行うための関数群. | |
クラス | |
| class | AbstractDxlibGui |
| Dxlibを使ったGUIの抽象クラス. [詳解] | |
| struct | ApplicationSettingRecord |
| アプリの設定を記録する構造体. [詳解] | |
| class | ApplicationSettingRecordValidator |
| ApplicationSettingRecord のバリデータ. [詳解] | |
| class | ApproximatedMotionRangeRender |
| 6脚歩行ロボットの近似された脚の動作範囲を描画するクラス. [詳解] | |
| class | AsyncableData |
| 非同期処理を行う際に,データの更新回数とデータをまとめて扱うためのクラス. [詳解] | |
| class | AsyncableData< std::vector< T > > |
| 非同期処理を行う際に, データの更新回数とデータをまとめて扱うための構造体.( vector 版) [詳解] | |
| class | AverageCalculator |
| 平均値,分散,標準偏差を求めるテンプレートクラス. [詳解] | |
| class | BootModeSelector |
| 起動モードを選択するクラス. [詳解] | |
| class | CameraDragger |
| マウスの入力でカメラを動かすクラス. [詳解] | |
| class | ComCandidatePolygonMaker |
| 重心位置の候補地点を示す多角形を作成するクラス. [詳解] | |
| struct | ComPosAndPolygon |
| 離散化された重心位置とその重心位置を含む多角形の組み合わせを表す構造体. [詳解] | |
| class | ComSelector |
| 重心の候補領域から重心位置を選択するクラス. [詳解] | |
| class | DeadLockChecker |
| 動作のループを感知するクラス. [詳解] | |
| class | DividedMapState |
| マップを格子状に分割して管理するクラス. [詳解] | |
| class | Dxlib3dRendererGroup |
| dxlib_renderer の draw 関数を呼ぶためのクラス. [詳解] | |
| class | DxlibCamera |
| Dxlib の3Dのカメラの状態を管理するクラス. [詳解] | |
| class | DxlibGuiCamera |
| カメラの操作・管理を行うGUIの処理・描画を行うクラス. [詳解] | |
| class | DxlibGuiCameraParameterDisplayer |
| カメラの情報を表示するGUIの処理・描画を行うクラス. [詳解] | |
| class | DxlibGuiDisplayNodeSwitcher |
| ノードの表示・切り替えを行うGUIのクラス. [詳解] | |
| class | DxlibGuiNodeDisplayer |
| ノードの情報を表示するGUIのクラス. [詳解] | |
| class | DxlibGuiRobotControl |
| カメラの操作・管理を行うGUIの処理・描画を行うクラス. [詳解] | |
| class | DxlibGuiTerminal |
| ×ボタンを押して消えたGUIを復活させるためのクラス. [詳解] | |
| class | DxlibGuiUpdater |
| クリック判定を行うクラス. [詳解] | |
| struct | DxlibMouseState |
| マウスの状態を表す構造体. [詳解] | |
| class | DxlibNodeSetterGroup |
| DxLibでノードの設定を行うクラスをまとめるクラス. [詳解] | |
| struct | EulerXYZ |
| XYZオイラー角を用いた回転を表す構造体. [詳解] | |
| class | FileTree |
| ファイルツリーを作成するクラス. [詳解] | |
| class | FontLoader |
| Dxlibのフォントを読み込むクラス. [詳解] | |
| class | FpsController |
| FPSを一定にキープするためのクラス. [詳解] | |
| class | GaitPatternGeneratorBasic |
| 普通にグラフ探索を行い,歩容パターン生成を行うクラス. [詳解] | |
| class | GaitPatternGeneratorRevaluation |
| 再評価手法を実装したクラス. [詳解] | |
| class | GaitPatternGeneratorSwitchMove |
| 複数の種類の歩容パターンの生成方法を切り替えるためのクラス. [詳解] | |
| class | GaitPatternGeneratorThread |
| 普通にグラフ探索を行い,歩容パターン生成を行うクラス. [詳解] | |
| class | GaitPatternGraphTree |
| RobotStateNode 構造体をノードとする木構造のグラフのクラス. [詳解] | |
| class | GpgBuilderChangePosture |
| class | GpgBuilderFlat |
| class | GraphComPlotter |
| class | GraphicConst |
| 画像表示処理用の定数クラス. [詳解] | |
| struct | GraphicDataBroker |
| グラフ探索の結果を別スレッドのグラフィッククラスに連絡するための構造体. [詳解] | |
| class | GraphicMainBasic |
| シミュレーションの一覧表示,ロボットの動きの軌跡の表示 などベーシックな機能を提供するクラス. [詳解] | |
| class | GraphicMainDisplayModel |
| ロボットのモデルを表示して,正しく動作しているかを確認するためのクラス. [詳解] | |
| class | GraphicMainGraphViewer |
| GraphViewerの画面を表示するクラス. [詳解] | |
| class | GraphicMainRobotControl |
| ロボットの制御を行うGUIの処理,描画を行うクラス. [詳解] | |
| class | GraphicSystem |
| Dxlibの処理を行うクラス. [詳解] | |
| class | GraphSearcherSpotTurn |
| グラフ探索を行い,直進する動作を評価するクラス. [詳解] | |
| class | GraphSearcherStraightMove |
| グラフ探索を行い,直進する動作を評価するクラス. [詳解] | |
| class | GraphSearcherTurn |
| グラフ探索を行い,直進する動作を評価するクラス. [詳解] | |
| struct | GraphSearchEvaluationValue |
| グラフ探索の評価値を格納する構造体. [詳解] | |
| struct | GraphSearchEvaluator |
| グラフ探索の評価値を評価するクラス. [詳解] | |
| struct | GraphSearchResult |
| グラフ探索の結果を表す構造体. [詳解] | |
| struct | GraphSearchResultRecord |
| グラフ探索の結果を格納する構造体. [詳解] | |
| class | GraphTreeCreator |
| 歩容パターングラフを作成するクラス. [詳解] | |
| class | GraphViewerGUIController |
| グラフのノードのデータを表示するGUIのコントローラークラス. [詳解] | |
| class | HexapodConst |
| Hexapodの定数をまとめたクラス. [詳解] | |
| struct | HexapodJointState |
| ロボットの関節の状態を表す構造体. [詳解] | |
| class | HexapodRendererBuilder |
| HexapodRendererクラスのインスタンスを作成するクラス. [詳解] | |
| class | IDxlib3dRenderer |
| DxLibの描画処理を行うクラスのインターフェース. [詳解] | |
| class | IDxlibClickable |
| クリック可能なGUIのインターフェース. [詳解] | |
| class | IDxlibDraggable |
| ドラッグ可能なGUIのインターフェース. [詳解] | |
| class | IDxlibGui |
| Dxlibの画面に表示するGUIのインターフェース. [詳解] | |
| class | IDxlibNodeSetter |
| DxLibのGuiやRendererでノードのセットを行うためのインターフェース. [詳解] | |
| class | IDxlibWheelHandler |
| マウスホイールの入力を受け取るためのインターフェース. [詳解] | |
| class | IGaitPatternGenerator |
| グラフ探索による歩容パターン生成を行うクラスのインターフェース. [詳解] | |
| class | IGraphicMain |
| GraphicMainのインターフェース. [詳解] | |
| class | IGraphSearcher |
| グラフ探索の処理のインターフェース. [詳解] | |
| class | IHexapodCoordinateConverter |
| ロボットは重心位置・アクチュエータなど様々な点を基準とする座標系を持つ. これらを相互に変換する処理のインターフェース. [詳解] | |
| class | IHexapodJointCalculator |
| 間接角度や角速度を計算する処理のインターフェース. [詳解] | |
| class | IHexapodPostureValidator |
| 6脚ロボットが有効な姿勢をとっているかを チェックする処理のインターフェース. [詳解] | |
| class | IHexapodStatePresenter |
| 6脚ロボットの状態を表示するクラス. [詳解] | |
| class | IMapCreator |
| マップ生成クラスのインターフェース. [詳解] | |
| class | INodeCreator |
| ノード生成処理のインターフェース. [詳解] | |
| class | INodeCreatorBuilder |
| INodeCreatorを生成するためのビルダークラス. [詳解] | |
| class | InterpolatedNodeCreator |
| 矩形軌道を生成し,ノード間を補間するクラス. [詳解] | |
| class | InterpolateValidator |
| 補間の妥当性を検証するクラス. [詳解] | |
| class | IRobotOperator |
| ロボットの動作を決定する処理のインターフェース. [詳解] | |
| class | ISimulationEndChecker |
| シミュレーションの終了を判定するクラスのインターフェース. [詳解] | |
| class | ISystemMain |
| プログラムの面の処理のインターフェース. [詳解] | |
| class | ITomlDataValidator |
| TOMLファイルのデータの検証を行う処理のインターフェース. [詳解] | |
| class | Keyboard |
| Dxlibのキーボード入力を取得するクラス. [詳解] | |
| struct | LineSegment2 |
| 2次元の線分を表す構造体. [詳解] | |
| class | MapCreatorByCsv |
| CSV ファイルからマップを生成するクラス. [詳解] | |
| class | MapCreatorForSimulation |
| シミュレーション用のマップを生成するクラス. [詳解] | |
| class | MapCreatorSelector |
| マップを生成するクラスを生成するクラス. [詳解] | |
| class | MapFileExporter |
| マップを csv に出力するクラス. マップには脚接地可能点が羅列されているので,1行ずつ出力する. [詳解] | |
| class | MapFileImporter |
| マップを csv に出力したものを読み込むクラス. [詳解] | |
| class | MapRenderer |
| マップの描画を行うクラス. [詳解] | |
| class | MapState |
| マップを表すクラス. [詳解] | |
| class | MathConst |
| float 型と double 型の定数を提供するクラス. [詳解] | |
| class | MathConst< double > |
| double型の定数を提供するクラス. [詳解] | |
| class | MathConst< float > |
| float型の定数を提供するクラス. [詳解] | |
| class | ModelLoader |
| Dxlibの3Dモデルを読み込むクラス. [詳解] | |
| class | Mouse |
| Dxlibでマウス入力を取得するクラス. [詳解] | |
| class | MovementLocusRenderer |
| ロボットの移動軌跡を描画するクラス. [詳解] | |
| class | NodeCreatorBodyRot |
| ロボットの回転を表すノードを生成するクラス. [詳解] | |
| class | NodeCreatorBuilderBodyRot |
| ノード作成ビルダーのボディ回転クラス [詳解] | |
| class | NodeCreatorBuilderGroundConformingRot |
| class | NodeCreatorBuilderStraightMove |
| 第5報の直進動作を行うノードを生成するクラス. [詳解] | |
| class | NodeCreatorBuilderTurn |
| 旋回動作用のノード生成クラスのビルダー. [詳解] | |
| class | NodeCreatorBuilderTurnSpot |
| 旋回動作用のノード生成クラスを生成するクラス. [詳解] | |
| class | NodeCreatorComMove |
| 波東さんの手法で重心の平行移動を行うクラス. [詳解] | |
| class | NodeCreatorComMoveStraight |
| 直線方向に重心の平行移動を行うクラス. [詳解] | |
| class | NodeCreatorComUpDown |
| 重心の上げ下げをするエッジ(辺,ノードとノードを繋ぐ物)の処理をするクラス. [詳解] | |
| class | NodeCreatorLegHierarchy |
| 脚の階層構造を作るためのクラス. [詳解] | |
| class | NodeCreatorLegUpDown |
| 脚の上げ下げをするエッジ(辺,ノードとノードを繋ぐ物)の処理をするクラス. [詳解] | |
| class | NodeCreatorLegUpDown2d |
| 脚の上げ下げをするエッジ(辺,ノードとノードを繋ぐ物)の処理をするクラス. [詳解] | |
| class | NodeCreatorLegUpDownRadius |
| 脚の上げ下げをするエッジ(辺,ノードとノードを繋ぐ物)の処理をするクラス. [詳解] | |
| class | NodeInitializer |
| ノードの初期化を行うクラス. シミュレーション時にノードの初期値を設定するために使用する. [詳解] | |
| class | PhantomXMkII |
| PhantomX mk-2 の状態を計算するクラス. [詳解] | |
| class | PhantomXMkIIConst |
| PhantomX mk-Ⅱ のパラメータを定数で表現したもの. [詳解] | |
| struct | PhantomXMkIIParameterRecord |
| class | PhantomXMkIIRendererModel |
| 3Dモデルを使用して PhantomX の描画を行うクラス. [詳解] | |
| class | PhantomXRendererSimple |
| 3Dモデルを使用せず,多角形を組み合わせてPhantomXの描画を行うクラス. [詳解] | |
| struct | Polygon2 |
| 2次元の多角形を表す構造体. [詳解] | |
| struct | Quaternion |
| クォータニオンを表す構造体. [詳解] | |
| class | ResultFileConst |
| class | ResultFileExporter |
| 結果をファイルに出力するクラス. シミュレーション結果をファイルに出力する処理を全てこのクラスにまとめた. [詳解] | |
| class | ResultFileImporter |
| 結果をファイルから読み込むクラス. [詳解] | |
| class | RobotGroundPointRenderer |
| ロボットが接地点した地点の履歴を描画するクラス. [詳解] | |
| struct | RobotOperation |
| 探索において目標となる座標や角度,評価する値についてまとめた構造体. [詳解] | |
| class | RobotOperatorFactory |
| TargetUpdaterを生成するファクトリクラス. [詳解] | |
| class | RobotOperatorFixed |
| 命令の更新をせず,初期化時の命令を送り続けるクラス. [詳解] | |
| class | RobotOperatorForGpg |
| global path generator を行うための仮置きクラス. [詳解] | |
| class | RobotOperatorForPath |
| 指定した中継地点を通るようにロボットを動かすクラス. [詳解] | |
| struct | RobotStateNode |
| グラフ構造のためのノード(頂点). [詳解] | |
| struct | RotationMatrix3x3 |
| 3次元の回転行列を表す構造体. [詳解] | |
| class | SerialCommunicationThread |
| class | SimpleButton |
| Dxlibのウィンドウのボタンの処理・描画を管理するクラス. [詳解] | |
| class | SimulationEndCheckerByGoalTape |
| ゴールテープによるシミュレーション終了判定クラス. [詳解] | |
| class | SimulationEndCheckerByPosition |
| 最終位置によるシミュレーション終了判定クラス. [詳解] | |
| class | SimulationEndCheckerByPosture |
| 最終姿勢によるシミュレーション終了判定クラス. [詳解] | |
| class | SimulationEndCheckerFactory |
| シミュレーションの終了を判定するクラスを生成するクラス. [詳解] | |
| struct | SimulationMapParameter |
| マップ生成時のモードとオプションを指定する構造体. [詳解] | |
| class | SimulationMapParameterValidator |
| SimulationMapParameter のバリデータ. [詳解] | |
| struct | SimulationResultRecord |
| シミュレーションの結果を格納する構造体. [詳解] | |
| struct | SimulationSettingRecord |
| class | Singleton |
| Singletonクラス作成のためのテンプレートクラス. [詳解] | |
| class | StabilityMarginRenderer |
| ロボットの静的安定余裕(支持脚多角形)を描画するクラス. [詳解] | |
| class | Stopwatch |
| 時間計測用のクラス. [詳解] | |
| class | SystemMainGraphViewer |
| グラフを表示するシステムのメインクラス. [詳解] | |
| class | SystemMainResultViewer |
| 結果を表示するシステムのクラス. [詳解] | |
| class | SystemMainRobotControl |
| class | SystemMainSimulation |
| 先行研究における int main()で行われていた処理をまとめたもので, 歩容生成シミュレーションを行うクラス. [詳解] | |
| class | TomlDataValidatorAlwaysTrue |
| 常に trueを返す ITomlDataValidator の実装クラス. [詳解] | |
| class | TomlDirectoryExporter |
| TOMLファイルを入れるディレクトリを作成し, TOMLファイル読み込みの準備をするクラス. [詳解] | |
| class | TomlFileExporter |
| TOMLファイルを出力するテンプレートクラス. [詳解] | |
| class | TomlFileImporter |
| tomlファイルを読み込んで構造体に変換するテンプレートクラス. [詳解] | |
| struct | Vector2 |
| 2次元の位置ベクトルを表す構造体. [詳解] | |
| struct | Vector3 |
| 3次元の位置ベクトルを表す構造体. [詳解] | |
| class | WorldGridRenderer |
| ワールドの格子線を描画するクラス. [詳解] | |
| class | XrR1 |
| class | XrR1Const |
| struct | XrR1ParameterRecord |
Concepts | |
| concept | CopyAssignable |
| concept | IsDxlibGui |
| IDxlibGuiを継承しているかどうかを判定する. | |
| concept | IsDxlibClickable |
| IDxlibClickableを継承しているかどうかを判定する. | |
| concept | IsDxlibDraggable |
| IDxlibDraggableを継承しているかどうかを判定する. | |
| concept | IsDxlibWheelHandler |
| IDxlibWheelHandlerを継承しているかどうかを判定する. | |
| concept | IsDxlibUpdatable |
| IDxlibGui, IDxlibClickable, IDxlibDraggable, IDxlibWheelHandlerのうちいずれかを継承しているかどうかを判定する. | |
| concept | HasIntoToml |
| into<T>を持つか判定するコンセプト. | |
| concept | HasFromToml |
| FromTomlを持つか判定するコンセプト. toml::from<T>::from_toml()が定義されているかどうかを判定する. また,デフォルトコンストラクタが実装されているかどうかも判定する. | |
列挙型 | |
| enum class | BootMode : int { kSimulation = 0 , kViewer , kDisplayModel , kResultViewer , kRobotControl } |
| 起動モードを表す列挙型. [詳解] | |
| enum class | DiscreteLegPos : int { kLowerBack = 1 , kBack , kUpperBack , kCenter , kLowerFront , kFront , kUpperFront } |
| 離散化された脚位置を表す列挙体. 先行研究では 1~7の int型の数値で表現されているが, 可読性を上げるために列挙体にした. 離散化された脚位置は 3bit (0 ~ 7)の範囲で表現されるため, これを拡張する場合, leg state を表す変数の型を変更する必要がある. [詳解] | |
| enum class | DisplayQuality : int { kLow = 0 , kMedium , kHigh } |
| 描画の品質設定を示す列挙体. [詳解] | |
| enum class | HexapodMove : int { kNone , kLegUpDown , kLegHierarchyChange , kComMove , kComUpDown , kBodyRollRot , kBodyPitchRot , kBodyYawRot } |
| ロボットが次にどの動作をするのかを表す列挙体. [詳解] | |
| enum class | OutputDetail : int { kSystem = 0 , kError , kWarning , kInfo , kDebug } |
| コマンドラインに文字を出力する際に,その詳細を指定するための列挙体. [詳解] | |
| enum class | RobotOperationType : int { kNone , kStraightMoveVector , kStraightMovePosition , kSpotTurnLastPosture , kSpotTurnRotAxis , kTurn } |
| Robotをどのように動かすかを表す列挙体. [詳解] | |
| enum class | SimulationMapMode : int { kFlat = 0 , kVerticalStripe , kHorizontalStripe , kDiagonalStripe , kMesh , kLatticePoint , kCircle , kDonut } |
| getMap関数のマップ生成のモードを指定する列挙体. [詳解] | |
| enum class | SimulationMapOption : unsigned int { kNone = 0 , kPerforated = 1 << 0 , kStep = 1 << 1 , kSlope = 1 << 2 , kTilt = 1 << 3 , kRough = 1 << 4 , kRadiation = 1 << 5 } |
| getMap関数のマップ生成のオプションを指定する列挙体. bit演算を利用して複数指定できる. 例えば穴あきかつ,階段状にしたいならば, MapCreateOption::kPerforated | SimulationMapOption::kStep と指定する. bit演算ができるように unsigned int型にしている. [詳解] | |
関数 | |
| DESIGNLAB_TOML11_DESCRIPTION_CLASS (ApplicationSettingRecord) | |
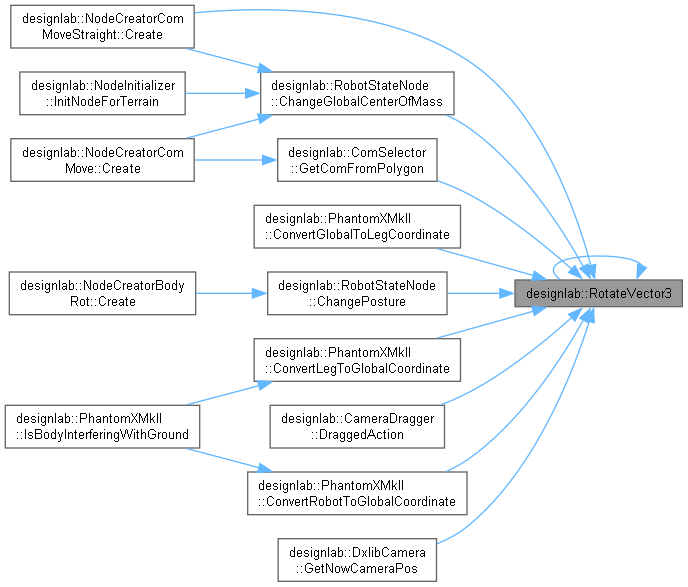
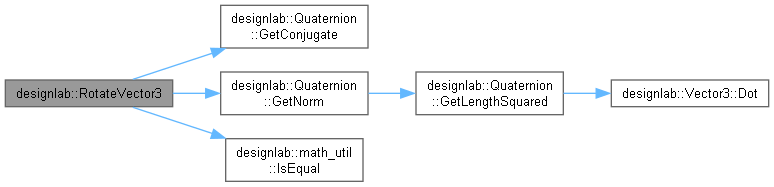
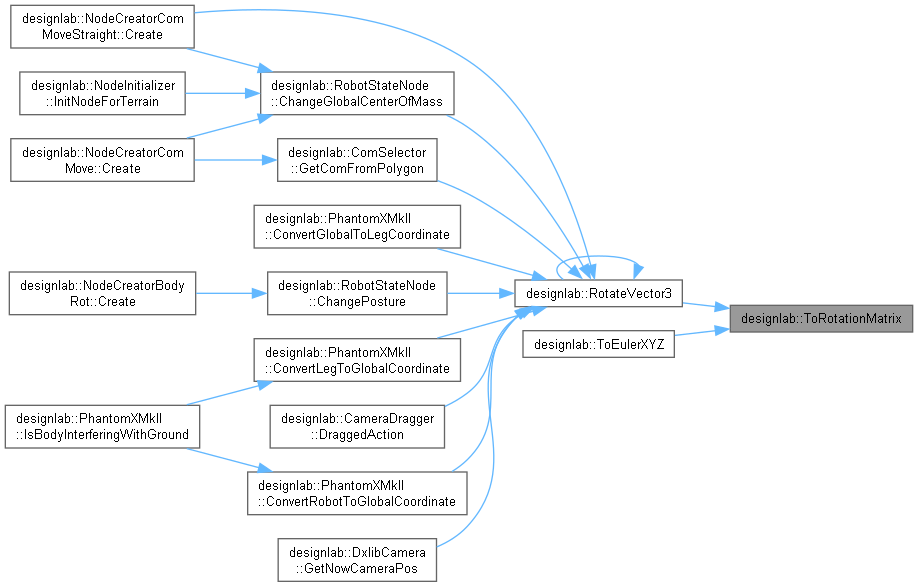
| Vector3 | RotateVector3 (const Vector3 &vec, const EulerXYZ &rot) |
| 回転させたベクトルを返す.三角関数の処理が多く重たいので注意. | |
| template<class Char > | |
| std::basic_ostream< Char > & | operator<< (std::basic_ostream< Char > &os, const EulerXYZ &r) |
| 出力ストリーム.Csv形式で出力する.カンマ区切り.単位は [rad]. | |
| template<class Char > | |
| std::basic_istream< Char > & | operator>> (std::basic_istream< Char > &is, EulerXYZ &r) |
| 入力ストリーム | |
| template<class Char > | |
| std::basic_ostream< Char > & | operator<< (std::basic_ostream< Char > &os, const Polygon2 &poly) |
| 出力ストリーム. | |
| Quaternion | SlerpQuaternion (const Quaternion &q1, const Quaternion &q2, float t) |
| 球面線形補間を行う. | |
| constexpr Quaternion | operator* (float s, const Quaternion &q) |
| template<class Char > | |
| std::basic_ostream< Char > & | operator<< (std::basic_ostream< Char > &os, const Quaternion &q) |
| 出力ストリーム. | |
| template<class Char > | |
| std::basic_istream< Char > & | operator>> (std::basic_istream< Char > &is, Quaternion &q) |
| 入力ストリーム. | |
| constexpr Vector3 | RotateVector3 (const Vector3 &vec, const Quaternion &q) |
| 3次元の位置ベクトルを回転させる.必ず正規化クォータニオンを用いること. | |
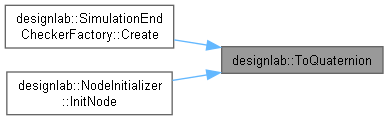
| Quaternion | ToQuaternion (const RotationMatrix3x3 &rot) |
| 回転角行列からクォータニオンへの変換. | |
| Quaternion | ToQuaternion (const EulerXYZ &e) |
| オイラー角からクォータニオンへの変換. | |
| RotationMatrix3x3 | ToRotationMatrix (const Quaternion &q) |
| クォータニオンから回転角行列への変換. | |
| RotationMatrix3x3 | ToRotationMatrix (const EulerXYZ &e) |
| XYZオイラー角から回転角行列への変換. | |
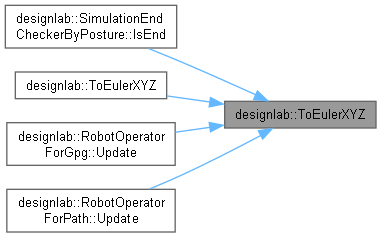
| EulerXYZ | ToEulerXYZ (const RotationMatrix3x3 &rot) |
| 回転角行列からXYZオイラー角への変換. | |
| EulerXYZ | ToEulerXYZ (const Quaternion &q) |
| クォータニオンからXYZオイラー角への変換. | |
| Vector3 | RotateVector3 (const Vector3 &vec, const RotationMatrix3x3 &rot) |
| 回転させたベクトルを返す. | |
| constexpr Vector2 | operator* (float s, const Vector2 &v) |
| スカラーが先に来る場合の掛け算演算子. | |
| template<class Char > | |
| std::basic_ostream< Char > & | operator<< (std::basic_ostream< Char > &os, const Vector2 &v) |
| template<class Char > | |
| std::basic_istream< Char > & | operator>> (std::basic_istream< Char > &is, Vector2 &v) |
| constexpr Vector3 | operator* (const float s, const Vector3 &vec) noexcept |
| スカラーが先に来る場合の掛け算演算子. | |
| template<class Char > | |
| std::basic_ostream< Char > & | operator<< (std::basic_ostream< Char > &os, const Vector3 &v) |
| 出力ストリーム. ToCsvString と同じ形式で出力する. | |
| template<class Char > | |
| std::basic_istream< Char > & | operator>> (std::basic_istream< Char > &is, Vector3 &v) |
| 入力ストリーム. | |
| DESIGNLAB_TOML11_DESCRIPTION_CLASS (PhantomXMkIIParameterRecord) | |
| DESIGNLAB_TOML11_DESCRIPTION_CLASS (RobotOperation) | |
| template<class Char > | |
| std::basic_ostream< Char > & | operator<< (std::basic_ostream< Char > &os, const RobotStateNode &value) |
| DESIGNLAB_TOML11_DESCRIPTION_CLASS (SimulationMapParameter) | |
| DESIGNLAB_TOML11_DESCRIPTION_CLASS (SimulationSettingRecord) | |
| DESIGNLAB_TOML11_DESCRIPTION_CLASS (XrR1ParameterRecord) | |
詳解
- todo:
- 仮置きのはずが,本実装になっているので,後で直す
列挙型詳解
◆ BootMode
|
strong |
起動モードを表す列挙型.
| 列挙値 | |
|---|---|
| kSimulation | シミュレーションモード. |
| kViewer | ビューワーモード. |
| kDisplayModel | ディスプレイモード. |
| kResultViewer | リザルトビューワーモード. |
| kRobotControl | ロボットコントロールモード. |
boot_mode.h の 16 行目に定義があります。
◆ DiscreteLegPos
|
strong |
離散化された脚位置を表す列挙体.
先行研究では 1~7の int型の数値で表現されているが, 可読性を上げるために列挙体にした.
離散化された脚位置は 3bit (0 ~ 7)の範囲で表現されるため, これを拡張する場合, leg state を表す変数の型を変更する必要がある.
| 列挙値 | |
|---|---|
| kLowerBack | 現在の位置より後方かつ下方にある. |
| kBack | 現在の位置より後方にある. |
| kUpperBack | 現在の位置より後方かつ上方にある. |
| kCenter | 現在の位置にある. |
| kLowerFront | 現在の位置より前方かつ下方にある. |
| kFront | 現在の位置より前方にある. |
| kUpperFront | 現在の位置より前方かつ上方にある. |
discrete_leg_pos.h の 19 行目に定義があります。
◆ DisplayQuality
|
strong |
描画の品質設定を示す列挙体.
enum DisplayQuality
| 列挙値 | |
|---|---|
| kLow | 低品質. |
| kMedium | 中品質. |
| kHigh | 高品質. |
display_quality.h の 17 行目に定義があります。
◆ HexapodMove
|
strong |
ロボットが次にどの動作をするのかを表す列挙体.
先行研究では int型の変数 debug を用いていたが,可読性が低いので列挙体を用いる.
hexapod_next_move.h の 17 行目に定義があります。
◆ OutputDetail
|
strong |
コマンドラインに文字を出力する際に,その詳細を指定するための列挙体.
設定ファイルで指定されたもの以上のメッセージのみ出力する.
| 列挙値 | |
|---|---|
| kSystem | システムメッセージ,常に出力する. |
| kError | エラーメッセージ. |
| kWarning | 警告メッセージ,エラーではないが注意が必要なメッセージ. |
| kInfo | 優先度低めの情報. |
| kDebug | デバッグ時のみ出力,一番優先度が低い. |
output_detail.h の 16 行目に定義があります。
◆ RobotOperationType
|
strong |
Robotをどのように動かすかを表す列挙体.
robot_operation.h の 34 行目に定義があります。
◆ SimulationMapMode
|
strong |
getMap関数のマップ生成のモードを指定する列挙体.
simulation_map_parameter.h の 21 行目に定義があります。
◆ SimulationMapOption
|
strong |
getMap関数のマップ生成のオプションを指定する列挙体.
bit演算を利用して複数指定できる. 例えば穴あきかつ,階段状にしたいならば, MapCreateOption::kPerforated | SimulationMapOption::kStep と指定する.
bit演算ができるように unsigned int型にしている.
| 列挙値 | |
|---|---|
| kNone | 特にオプションを指定しない. |
| kPerforated | 穴の空いたマップに変化させる. |
| kStep | 階段状の地形に変化させる. |
| kSlope | スロープ状の地形に変化させる. |
| kTilt | 縦軸を中心軸として回転させた地形に変化させる. |
| kRough | 凸凹の地形に変化させる. |
| kRadiation | 放射状の地形に変化させる. |
simulation_map_parameter.h の 38 行目に定義があります。
関数詳解
◆ DESIGNLAB_TOML11_DESCRIPTION_CLASS() [1/6]
| designlab::DESIGNLAB_TOML11_DESCRIPTION_CLASS | ( | ApplicationSettingRecord | ) |

◆ DESIGNLAB_TOML11_DESCRIPTION_CLASS() [2/6]
| designlab::DESIGNLAB_TOML11_DESCRIPTION_CLASS | ( | PhantomXMkIIParameterRecord | ) |
phantomx_mk2_parameter_record.h の 41 行目に定義があります。
◆ DESIGNLAB_TOML11_DESCRIPTION_CLASS() [3/6]
| designlab::DESIGNLAB_TOML11_DESCRIPTION_CLASS | ( | RobotOperation | ) |

◆ DESIGNLAB_TOML11_DESCRIPTION_CLASS() [4/6]
| designlab::DESIGNLAB_TOML11_DESCRIPTION_CLASS | ( | SimulationMapParameter | ) |

◆ DESIGNLAB_TOML11_DESCRIPTION_CLASS() [5/6]
| designlab::DESIGNLAB_TOML11_DESCRIPTION_CLASS | ( | SimulationSettingRecord | ) |

◆ DESIGNLAB_TOML11_DESCRIPTION_CLASS() [6/6]
| designlab::DESIGNLAB_TOML11_DESCRIPTION_CLASS | ( | XrR1ParameterRecord | ) |
xr_r1_parameter_record.h の 34 行目に定義があります。
◆ operator*() [1/3]
◆ operator*() [2/3]
|
constexpr |
math_quaternion.h の 219 行目に定義があります。
◆ operator*() [3/3]
◆ operator<<() [1/6]
|
inline |
出力ストリーム.Csv形式で出力する.カンマ区切り.単位は [rad].
math_euler.h の 30 行目に定義があります。
◆ operator<<() [2/6]
|
inline |
出力ストリーム.
math_polygon2.h の 38 行目に定義があります。
◆ operator<<() [3/6]
|
inline |
出力ストリーム.
math_quaternion.h の 219 行目に定義があります。
◆ operator<<() [4/6]
| std::basic_ostream< Char > & designlab::operator<< | ( | std::basic_ostream< Char > & | os, |
| const RobotStateNode & | value | ||
| ) |
robot_state_node.h の 39 行目に定義があります。
◆ operator<<() [5/6]
| std::basic_ostream< Char > & designlab::operator<< | ( | std::basic_ostream< Char > & | os, |
| const Vector2 & | v | ||
| ) |
math_vector2.h の 158 行目に定義があります。
◆ operator<<() [6/6]
| std::basic_ostream< Char > & designlab::operator<< | ( | std::basic_ostream< Char > & | os, |
| const Vector3 & | v | ||
| ) |
出力ストリーム. ToCsvString と同じ形式で出力する.
math_vector3.h の 253 行目に定義があります。
◆ operator>>() [1/4]
|
inline |
入力ストリーム
math_euler.h の 119 行目に定義があります。
◆ operator>>() [2/4]
|
inline |
入力ストリーム.
math_quaternion.h の 233 行目に定義があります。
◆ operator>>() [3/4]
|
inline |
math_vector2.h の 171 行目に定義があります。
◆ operator>>() [4/4]
|
inline |
入力ストリーム.
math_vector3.h の 272 行目に定義があります。
◆ RotateVector3() [1/3]
回転させたベクトルを返す.三角関数の処理が多く重たいので注意.
- 引数
-
[in] vec 位置ベクトル. [in] rot 回転ベクトル.
- 戻り値
- 回転した後の位置ベクトル.
math_euler.cpp の 50 行目に定義があります。

◆ RotateVector3() [2/3]
|
constexpr |
3次元の位置ベクトルを回転させる.必ず正規化クォータニオンを用いること.
- 引数
-
[in] vec 回転させるベクトル. [in] q 回転させるクォータニオン.
正規化クォータニオンならば,共役と逆数が等しいので, 計算量を減らすことができる.
- 戻り値
- 回転後のベクトル.
math_quaternion.h の 247 行目に定義があります。
◆ RotateVector3() [3/3]
| Vector3 designlab::RotateVector3 | ( | const Vector3 & | vec, |
| const RotationMatrix3x3 & | rot | ||
| ) |
回転させたベクトルを返す.
- 引数
-
[in] vec 回転させるベクトル. [in] rot 回転行列.
- 戻り値
- 回転させたベクトル.
math_rotation_matrix.cpp の 93 行目に定義があります。
◆ SlerpQuaternion()
| Quaternion designlab::SlerpQuaternion | ( | const Quaternion & | q1, |
| const Quaternion & | q2, | ||
| float | t | ||
| ) |
球面線形補間を行う.
- 引数
-
[in] q1 クォータニオン1. [in] q2 クォータニオン2. [in] t 補間係数.0~1の値を取る.
- 戻り値
- 補間されたクォータニオン.
math_quaternion.cpp の 58 行目に定義があります。


◆ ToEulerXYZ() [1/2]
| EulerXYZ designlab::ToEulerXYZ | ( | const Quaternion & | q | ) |

◆ ToEulerXYZ() [2/2]
| EulerXYZ designlab::ToEulerXYZ | ( | const RotationMatrix3x3 & | rot | ) |
回転角行列からXYZオイラー角への変換.
- 引数
-
[in] rot 回転角行列.
- 戻り値
- XYZオイラー角.
math_rot_converter.cpp の 99 行目に定義があります。
◆ ToQuaternion() [1/2]
| Quaternion designlab::ToQuaternion | ( | const EulerXYZ & | e | ) |

◆ ToQuaternion() [2/2]
| Quaternion designlab::ToQuaternion | ( | const RotationMatrix3x3 & | rot | ) |
回転角行列からクォータニオンへの変換.
- 引数
-
[in] rot 回転角行列.
- 戻り値
- クォータニオン.
math_rot_converter.cpp の 16 行目に定義があります。

◆ ToRotationMatrix() [1/2]
| RotationMatrix3x3 designlab::ToRotationMatrix | ( | const EulerXYZ & | e | ) |
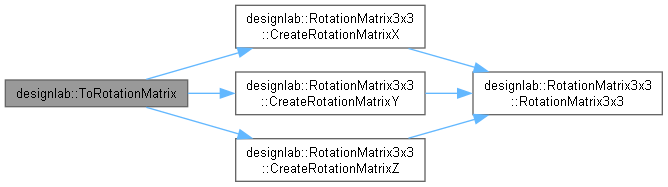
◆ ToRotationMatrix() [2/2]
| RotationMatrix3x3 designlab::ToRotationMatrix | ( | const Quaternion & | q | ) |
クォータニオンから回転角行列への変換.
- 引数
-
[in] q クォータニオン.
- 戻り値
- 回転角行列.
math_rot_converter.cpp の 59 行目に定義があります。

変数詳解
◆ do_output
| bool designlab::do_output = true |
cmdio_util.cpp の 24 行目に定義があります。
◆ is_initialized
| bool designlab::is_initialized = false |
cmdio_util.cpp の 26 行目に定義があります。
◆ kDxlibGuiAnchorBottom
|
constexpr |
interface_dxlib_gui.h の 20 行目に定義があります。
◆ kDxlibGuiAnchorLeft
|
constexpr |
interface_dxlib_gui.h の 15 行目に定義があります。
◆ kDxlibGuiAnchorLeftBottom
|
constexpr |
interface_dxlib_gui.h の 29 行目に定義があります。
◆ kDxlibGuiAnchorLeftMiddleY
|
constexpr |
interface_dxlib_gui.h の 26 行目に定義があります。
◆ kDxlibGuiAnchorLeftTop
|
constexpr |
interface_dxlib_gui.h の 23 行目に定義があります。
◆ kDxlibGuiAnchorMiddleX
|
constexpr |
interface_dxlib_gui.h の 16 行目に定義があります。
◆ kDxlibGuiAnchorMiddleXBottom
|
constexpr |
interface_dxlib_gui.h の 38 行目に定義があります。
◆ kDxlibGuiAnchorMiddleXMiddleY
|
constexpr |
interface_dxlib_gui.h の 35 行目に定義があります。
◆ kDxlibGuiAnchorMiddleXTop
|
constexpr |
interface_dxlib_gui.h の 32 行目に定義があります。
◆ kDxlibGuiAnchorMiddleY
|
constexpr |
interface_dxlib_gui.h の 19 行目に定義があります。
◆ kDxlibGuiAnchorRight
|
constexpr |
interface_dxlib_gui.h の 17 行目に定義があります。
◆ kDxlibGuiAnchorRightBottom
|
constexpr |
interface_dxlib_gui.h の 47 行目に定義があります。
◆ kDxlibGuiAnchorRightMiddleY
|
constexpr |
interface_dxlib_gui.h の 44 行目に定義があります。
◆ kDxlibGuiAnchorRightTop
|
constexpr |
interface_dxlib_gui.h の 41 行目に定義があります。
◆ kDxlibGuiAnchorTop
|
constexpr |
interface_dxlib_gui.h の 18 行目に定義があります。
◆ output_limit
| OutputDetail designlab::output_limit = OutputDetail::kSystem |
cmdio_util.cpp の 22 行目に定義があります。