RobotStateNode 構造体をノードとする木構造のグラフのクラス. [詳解]
#include <gait_pattern_graph_tree.h>
公開メンバ関数 | |
| GaitPatternGraphTree ()=delete | |
| GaitPatternGraphTree (const int graph_max_size) | |
| コンストラクタ. ノード数の最大値を指定する. | |
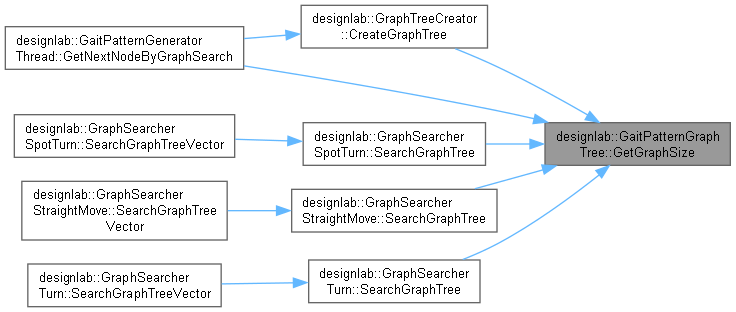
| constexpr int | GetGraphSize () const |
| グラフのノードの総数を返す. | |
| constexpr bool | IsEmpty () const |
| グラフが空かどうかを返す. | |
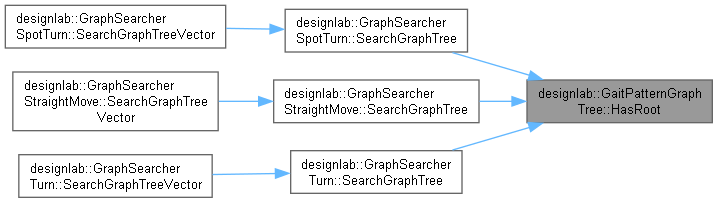
| constexpr bool | HasRoot () const |
| グラフが根ノードを持つかどうかを返す. 根ノードとは,親を持たないノードのこと. 一番最初に追加するノードは必ず根になるため, 根を持つかどうかはノードの総数が0でないかどうかで判定できる. | |
| constexpr int | GetRootIndex () const |
| グラフの根ノードのインデックスを返す. ノードがない場合を考慮していないため, HasRoot()で根ノードを持つかどうかを確認すること. 一番最初に追加されたノードは必ず根ノードになるため, 根ノードのインデックスは0で固定される. | |
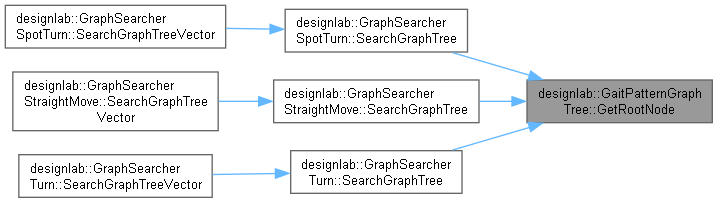
| const RobotStateNode & | GetRootNode () const |
| グラフの根ノードの参照を返す. | |
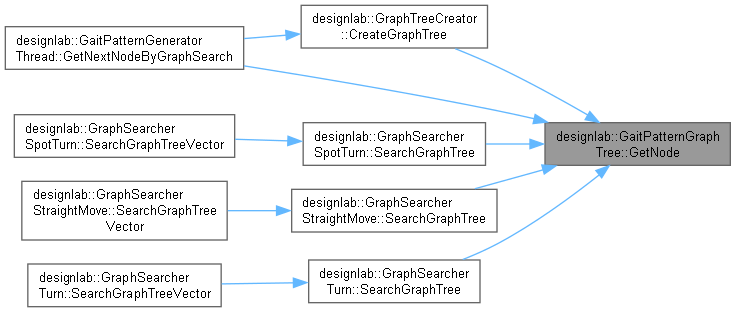
| const RobotStateNode & | GetNode (const int index) const |
| グラフのノードの参照を返す. | |
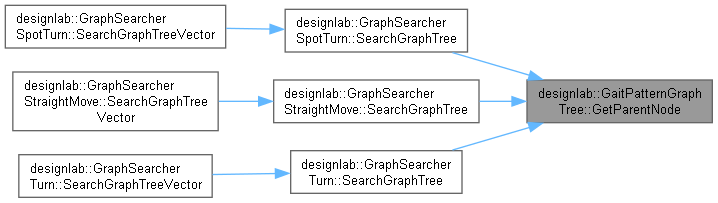
| const RobotStateNode & | GetParentNode (const int index, const int depth) const |
| 指定したノードの親ノードの参照を返す.depthは親ノードの深さを指定する. | |
| const int | GetParentNodeIndex (const int index, const int depth) const |
| 指定したノードの親ノードの参照を返す.depthは親ノードの深さを指定する. | |
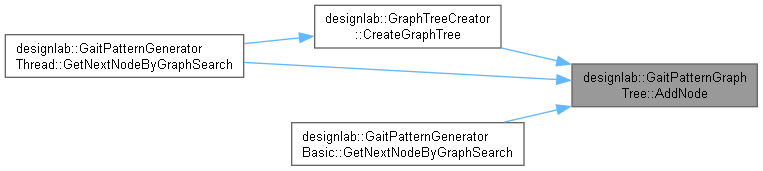
| void | AddNode (const RobotStateNode &node) |
| ノードを追加する. 追加するノードは親ノードのインデックスと,depthの指定が適切にされている必要がある. これらが適切にされていない場合,アサーションに引っかかる. また,あらかじめ確保したノード数を超えて追加しようとするとアサーションに引っかかる. この条件下では一番最初に追加されるノードは必ず根ノード(親を持たず,深さ0)になる, | |
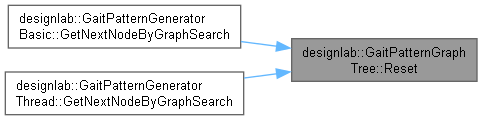
| constexpr void | Reset () |
| グラフをリセットする. | |
| std::vector< float > | GetCoMVerticalTrajectory (const int index) const |
| 指定したノードの重心の上下移動軌跡を返す. | |
詳解
RobotStateNode 構造体をノードとする木構造のグラフのクラス.
論文でいうところの歩容パターングラフ.
gait_pattern_graph_tree.h の 21 行目に定義があります。
構築子と解体子
◆ GaitPatternGraphTree() [1/2]
|
delete |
◆ GaitPatternGraphTree() [2/2]
|
inlineexplicit |
関数詳解
◆ AddNode()
|
inline |
ノードを追加する.
追加するノードは親ノードのインデックスと,depthの指定が適切にされている必要がある.
これらが適切にされていない場合,アサーションに引っかかる.
また,あらかじめ確保したノード数を超えて追加しようとするとアサーションに引っかかる.
この条件下では一番最初に追加されるノードは必ず根ノード(親を持たず,深さ0)になる,
- 引数
-
[in] node 追加するノード.
gait_pattern_graph_tree.h の 101 行目に定義があります。
◆ GetCoMVerticalTrajectory()
|
inline |
指定したノードの重心の上下移動軌跡を返す.
- 引数
-
[in] index 参照したいノードのインデックス. 最大ノード数を超える数を指定するとアサーションに引っかかる.
- 戻り値
- 指定したノードの重心の上下移動軌跡.
gait_pattern_graph_tree.h の 123 行目に定義があります。

◆ GetGraphSize()
|
inlineconstexpr |
◆ GetNode()
|
inline |
グラフのノードの参照を返す.
- 引数
-
[in] index 参照したいノードのインデックス. 最大ノード数を超える数を指定するとアサーションに引っかかる.
- 戻り値
- インデックスで指定したノードの参照.
gait_pattern_graph_tree.h の 68 行目に定義があります。
◆ GetParentNode()
| const RobotStateNode & designlab::GaitPatternGraphTree::GetParentNode | ( | const int | index, |
| const int | depth | ||
| ) | const |
指定したノードの親ノードの参照を返す.depthは親ノードの深さを指定する.
- 引数
-
[in] index 参照したいノードのインデックス. 最大ノード数を超える数を指定するとアサーションに引っかかる. [in] depth 親ノードの深さ.
- 戻り値
- インデックスで指定したノードの親ノードの参照.
gait_pattern_graph_tree.cpp の 12 行目に定義があります。
◆ GetParentNodeIndex()
| const int designlab::GaitPatternGraphTree::GetParentNodeIndex | ( | const int | index, |
| const int | depth | ||
| ) | const |
指定したノードの親ノードの参照を返す.depthは親ノードの深さを指定する.
- 引数
-
[in] index 参照したいノードのインデックス. 最大ノード数を超える数を指定するとアサーションに引っかかる. [in] depth 親ノードの深さ.
- 戻り値
- indexで指定したノードの親ノードのインデックス.
gait_pattern_graph_tree.cpp の 32 行目に定義があります。
◆ GetRootIndex()
|
inlineconstexpr |
グラフの根ノードのインデックスを返す.
ノードがない場合を考慮していないため, HasRoot()で根ノードを持つかどうかを確認すること.
一番最初に追加されたノードは必ず根ノードになるため, 根ノードのインデックスは0で固定される.
- 戻り値
- グラフの根ノードのインデックス.
gait_pattern_graph_tree.h の 56 行目に定義があります。
◆ GetRootNode()
|
inline |
グラフの根ノードの参照を返す.
- 戻り値
- const RobotStateNode& グラフの根ノードの参照.
gait_pattern_graph_tree.h の 60 行目に定義があります。
◆ HasRoot()
|
inlineconstexpr |
グラフが根ノードを持つかどうかを返す.
根ノードとは,親を持たないノードのこと.
一番最初に追加するノードは必ず根になるため, 根を持つかどうかはノードの総数が0でないかどうかで判定できる.
- 戻り値
-
true グラフが根ノードを持つ. false グラフが根ノードを持たない.
gait_pattern_graph_tree.h の 48 行目に定義があります。
◆ IsEmpty()
|
inlineconstexpr |

◆ Reset()
|
inlineconstexpr |
このクラス詳解は次のファイルから抽出されました:
- DesignLab/gait_pattern_graph_tree.h
- DesignLab/gait_pattern_graph_tree.cpp