グラフ構造のためのノード(頂点). [詳解]
#include <robot_state_node.h>
公開メンバ関数 | |
| constexpr | RobotStateNode () |
| constexpr | RobotStateNode (const leg_func::LegStateBit &state, const std::array< Vector3, HexapodConst::kLegNum > &pos, const std::array< Vector3, HexapodConst::kLegNum > &ref_pos, const Vector3 &com, const Quaternion &q, const HexapodMove move, const int parent, const int d) |
| RobotStateNode (const RobotStateNode &other)=default | |
| RobotStateNode (RobotStateNode &&other) noexcept=default | |
| RobotStateNode & | operator= (const RobotStateNode &other)=default |
| ~RobotStateNode ()=default | |
| void | ChangeGlobalCenterOfMass (const Vector3 &new_com, bool do_change_leg_base_pos) |
| 重心位置を変更する関数. | |
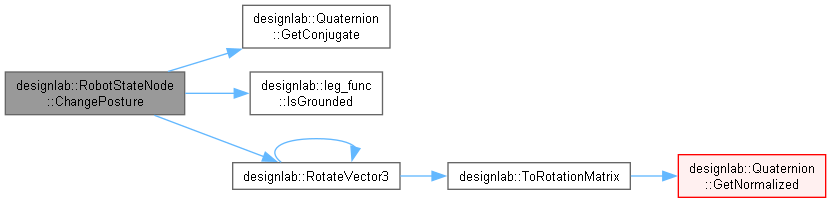
| void | ChangePosture (const std::shared_ptr< const IHexapodCoordinateConverter > &converter_ptr, const Quaternion &new_posture) |
| クォータニオンを変更し,胴体を回転させる関数. | |
| void | ChangeLootNode () |
| 自身を根ノードに変更する関数. depthを0に,parent_numを-1に初期化する. | |
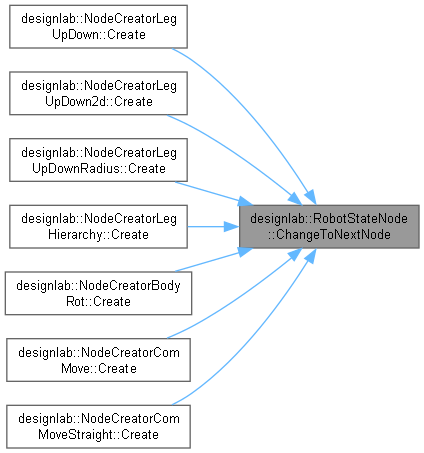
| constexpr void | ChangeToNextNode (const int parent_index_, const HexapodMove next_move_) |
| 次の動作を設定する関数. 深さを一つ深くして,親と次の動作を設定する. | |
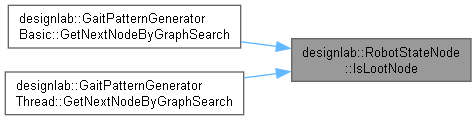
| constexpr bool | IsLootNode () const |
| 自身が根ノードであるか判定する. | |
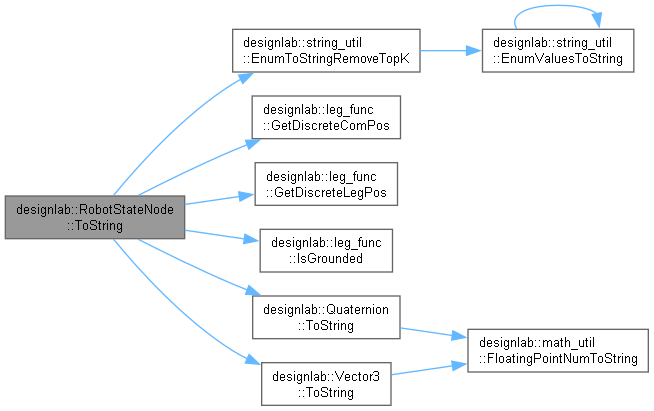
| std::string | ToString () const |
| ノードの情報を文字列に変換する関数. デバッグ用に詳細な情報を出力する. | |
| std::string | ToCsvString () const |
| ノードの情報を csv形式の文字列に変換する関数. カンマ区切りで出力する. | |
| constexpr bool | operator== (const RobotStateNode &other) const |
| 比較演算子 | |
| constexpr bool | operator!= (const RobotStateNode &other) |
静的公開メンバ関数 | |
| static RobotStateNode | FromString (const std::string &str) |
| 文字列をノードの情報に変換する関数. | |
公開変数類 | |
| leg_func::LegStateBit | leg_state |
| [4 byte] 脚状態,重心パターンを bitで表す.旧名 leg_con. | |
| std::array< Vector3, HexapodConst::kLegNum > | leg_pos |
| [4 * 3 * 6 = 72 byte] 脚先の座標.(coxa(脚の付け根)を原点とする) | |
| std::array< Vector3, HexapodConst::kLegNum > | leg_reference_pos |
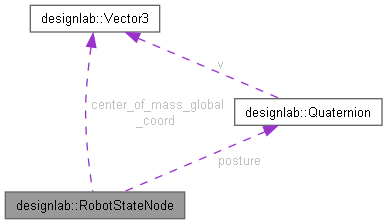
| Vector3 | center_of_mass_global_coord |
| [4 * 3 = 12byte] グローバル座標系における重心の位置.旧名 GCOM | |
| Quaternion | posture |
| [4 * 4 = 16byte] 姿勢を表すクォータニオン. | |
| HexapodMove | next_move |
| int | parent_index |
| int | depth |
| [4 byte] 自身の深さ.一番上の親が深さ0となる. | |
静的公開変数類 | |
| static constexpr int | kNoParentIndex = -1 |
| 親がいないことを表す値. | |
詳解
グラフ構造のためのノード(頂点).
この構造体は,グラフ構造のためのノード(頂点)である.
ノードは,脚の状態,脚先の座標,脚接地の基準点の座標,重心の位置, ロールピッチヨーの回転角度,親ノードの番号,次の動作,深さを持つ.
すなわちロボットの現在の状態を表している. しかし,脚の関節角度など一部の情報を持ってはいない.
これは実時間内に,グラフ探索を終えるための工夫である.
先行研究のプログラムに比べて大きく内容を変更したが, 基本的な構造は同じである. また,ロボットの座標系は通例,進行方向をXの正,ロボットの真上をZの正, y軸は右手座標系でとる. そのため,このプログラムもそのように統一する.
robot_state_node.h の 39 行目に定義があります。
構築子と解体子
◆ RobotStateNode() [1/4]
|
inlineconstexpr |
robot_state_node.h の 42 行目に定義があります。
◆ RobotStateNode() [2/4]
|
inlineconstexpr |
robot_state_node.h の 53 行目に定義があります。
◆ RobotStateNode() [3/4]
|
default |
◆ RobotStateNode() [4/4]
|
defaultnoexcept |
◆ ~RobotStateNode()
|
default |
関数詳解
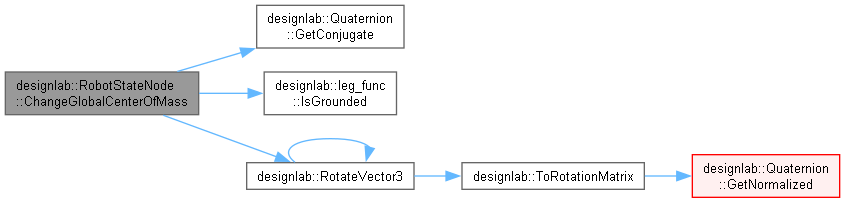
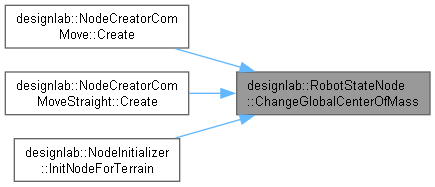
◆ ChangeGlobalCenterOfMass()
| void designlab::RobotStateNode::ChangeGlobalCenterOfMass | ( | const Vector3 & | new_com, |
| bool | do_change_leg_base_pos | ||
| ) |
重心位置を変更する関数.
- 引数
-
[in] new_com 新しい重心位置.グローバル座標系. [in] do_change_leg_base_pos 遊脚中の脚の接地基準地点の座標を変更するかどうか
脚位置は脚の付け根からの相対座標で表現されている.
遊脚している脚は一緒に移動するが, 接地脚は移動しないため座標を変更してやる必要がある.
robot_state_node.cpp の 20 行目に定義があります。
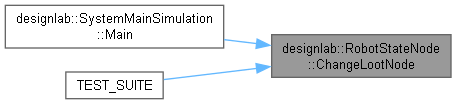
◆ ChangeLootNode()
|
inline |
自身を根ノードに変更する関数.
depthを0に,parent_numを-1に初期化する.
robot_state_node.h の 92 行目に定義があります。

◆ ChangePosture()
| void designlab::RobotStateNode::ChangePosture | ( | const std::shared_ptr< const IHexapodCoordinateConverter > & | converter_ptr, |
| const Quaternion & | new_posture | ||
| ) |
クォータニオンを変更し,胴体を回転させる関数.
- 引数
-
[in] converter_ptr 座標変換クラスのポインタ. [in] new_posture 新しい姿勢.単位クォータニオン.
robot_state_node.cpp の 37 行目に定義があります。

◆ ChangeToNextNode()
|
inlineconstexpr |
次の動作を設定する関数.
深さを一つ深くして,親と次の動作を設定する.
- 引数
-
[in] parent_index_ 親ノードの番号. [in] next_move_ 次の動作.
robot_state_node.h の 102 行目に定義があります。
◆ FromString()
|
static |
文字列をノードの情報に変換する関数.
- 引数
-
[in] str ノードの情報をまとめた文字列,カンマ区切り.
- 戻り値
- ロボットの状態を表すノード.
- todo:
- うまく読み込めなかった時の処理を書く.
robot_state_node.cpp の 139 行目に定義があります。

◆ IsLootNode()
|
inlineconstexpr |
自身が根ノードであるか判定する.
- 戻り値
-
true 自身が根ノードである. false 自身が根ノードでない.
robot_state_node.h の 112 行目に定義があります。
◆ operator!=()
|
inlineconstexpr |
robot_state_node.h の 163 行目に定義があります。
◆ operator=()
|
default |
◆ operator==()
|
inlineconstexpr |
比較演算子
robot_state_node.h の 132 行目に定義があります。
◆ ToCsvString()
| std::string designlab::RobotStateNode::ToCsvString | ( | ) | const |
ノードの情報を csv形式の文字列に変換する関数.
カンマ区切りで出力する.
- 戻り値
- ノードの情報を csv形式の文字列にしたもの.
robot_state_node.cpp の 131 行目に定義があります。
◆ ToString()
| std::string designlab::RobotStateNode::ToString | ( | ) | const |
ノードの情報を文字列に変換する関数.
デバッグ用に詳細な情報を出力する.
- 戻り値
- ノードの情報を文字列にしたもの.
robot_state_node.cpp の 63 行目に定義があります。
メンバ詳解
◆ center_of_mass_global_coord
| Vector3 designlab::RobotStateNode::center_of_mass_global_coord |
[4 * 3 = 12byte] グローバル座標系における重心の位置.旧名 GCOM
robot_state_node.h の 178 行目に定義があります。
◆ depth
| int designlab::RobotStateNode::depth |
[4 byte] 自身の深さ.一番上の親が深さ0となる.
robot_state_node.h の 192 行目に定義があります。
◆ kNoParentIndex
|
staticconstexpr |
親がいないことを表す値.
robot_state_node.h の 40 行目に定義があります。
◆ leg_pos
| std::array<Vector3, HexapodConst::kLegNum> designlab::RobotStateNode::leg_pos |
[4 * 3 * 6 = 72 byte] 脚先の座標.(coxa(脚の付け根)を原点とする)
robot_state_node.h の 171 行目に定義があります。
◆ leg_reference_pos
| std::array<Vector3, HexapodConst::kLegNum> designlab::RobotStateNode::leg_reference_pos |
[4 * 3 * 6 = 72 byte] 脚接地の基準点の座標. 離散化した時に4になる地点.(coxa(脚の付け根)を原点とする)
robot_state_node.h の 175 行目に定義があります。
◆ leg_state
| leg_func::LegStateBit designlab::RobotStateNode::leg_state |
[4 byte] 脚状態,重心パターンを bitで表す.旧名 leg_con.
robot_state_node.h の 168 行目に定義があります。
◆ next_move
| HexapodMove designlab::RobotStateNode::next_move |
[4 byte] 次の動作を代入する. 元のプログラムでは int debug が担っていた仕事を行う.
robot_state_node.h の 185 行目に定義があります。
◆ parent_index
| int designlab::RobotStateNode::parent_index |
[4 byte] 自身の親が vector 配列のどこにいるのかを記録する. 親がいないなら負の値をとる.
robot_state_node.h の 189 行目に定義があります。
◆ posture
| Quaternion designlab::RobotStateNode::posture |
[4 * 4 = 16byte] 姿勢を表すクォータニオン.
robot_state_node.h の 181 行目に定義があります。
この構造体詳解は次のファイルから抽出されました:
- DesignLab/robot_state_node.h
- DesignLab/robot_state_node.cpp