このプログラムでは脚状態をビット(28bit)の情報で表す. そのデータを処理するための関数. [詳解]
型定義 | |
| using | LegStateBit = std::bitset< kLegStateBitNum > |
| 脚状態を保存する型.28bitのビット型. | |
| using | LegGroundedBit = std::bitset< HexapodConst::kLegNum > |
| 脚の遊脚・接地を表す型.6bitのビット型.接地が 1 遊脚が 0. | |
関数 | |
| LegStateBit | MakeLegStateBit (enums::DiscreteComPos discrete_com_pos, const std::array< bool, HexapodConst::kLegNum > &is_ground, const std::array< DiscreteLegPos, HexapodConst::kLegNum > &leg_pos) |
| 脚状態を作成して返す関数.脚状態は重心パターン, 脚の接地・遊脚,離散化した脚位置のデータが含まれる. | |
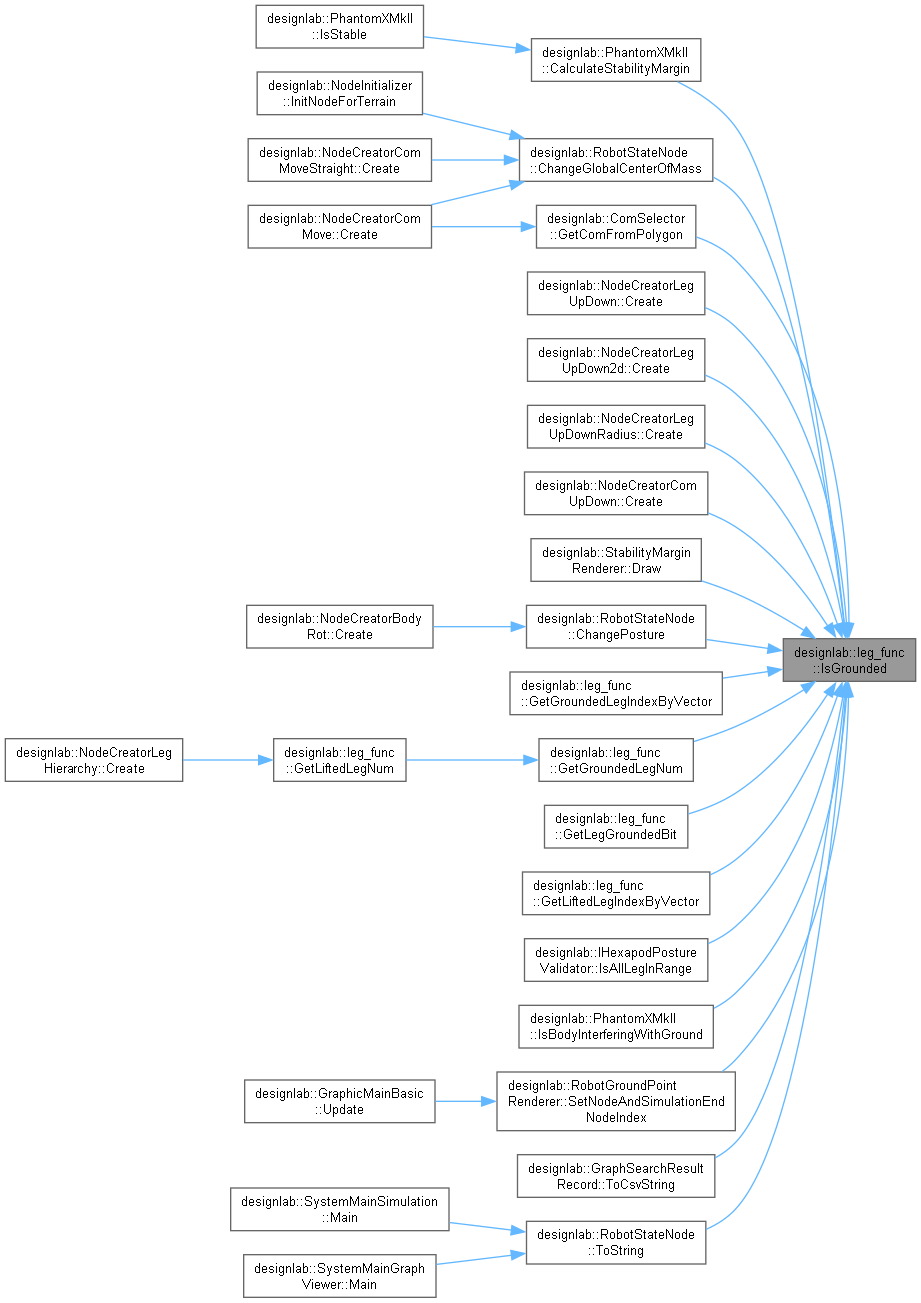
| bool | IsGrounded (const LegStateBit &leg_state_bit, int leg_index) |
| 脚番号 leg_index 0 ~ 5 に応じて,その脚が接地しているかを調べる. 脚は右前脚を0番として,時計回りに0,1,2,3,4,5となる.左前足が5番. | |
| LegGroundedBit | GetLegGroundedBit (const LegStateBit &leg_state) |
| 脚が接地しているなら1,遊脚を0としたビット列で遊脚・接地脚の状態を返す. 例えば 0 番脚のみが遊脚しているなら 0b111 110 を返す. | |
| int | GetGroundedLegNum (const LegStateBit &leg_state) |
| 接地している脚の本数を返す関数. | |
| int | GetLiftedLegNum (const LegStateBit &leg_state) |
| 遊脚している脚の本数を返す関数. | |
| void | GetGroundedLegIndexByVector (const LegStateBit &leg_state, std::vector< int > *res_index) |
| 接地している脚の脚番号0~5を,引数で参照渡しする関数. | |
| void | GetLiftedLegIndexByVector (const LegStateBit &leg_state, std::vector< int > *res_index) |
| 遊脚している脚の脚番号0~5を,引数_res_numberで参照渡しする関数. | |
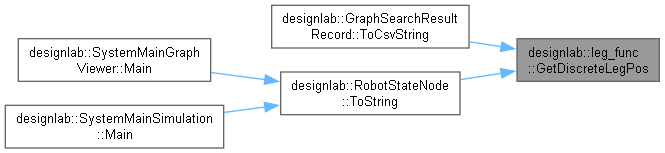
| DiscreteLegPos | GetDiscreteLegPos (const LegStateBit &leg_state, int leg_index) |
| 脚状態を取得する. | |
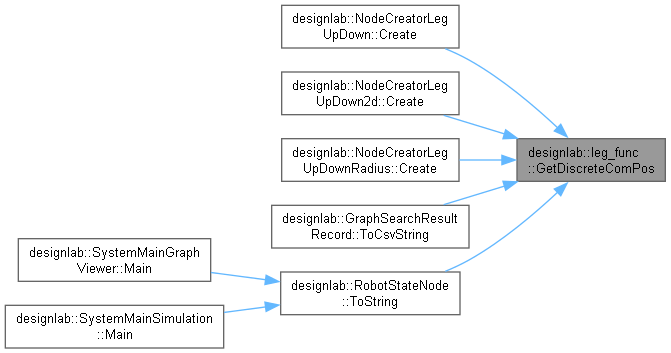
| enums::DiscreteComPos | GetDiscreteComPos (const LegStateBit &leg_state) |
| 現在の脚状態から重心パターンを取得する. | |
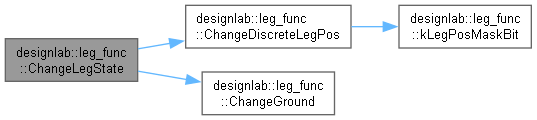
| void | ChangeLegState (int leg_index, DiscreteLegPos new_discretized_leg_pos, bool is_ground, LegStateBit *leg_state) |
| 脚の情報を変更する. | |
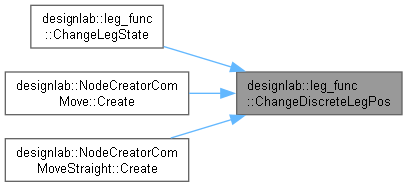
| void | ChangeDiscreteLegPos (int leg_index, DiscreteLegPos new_discretized_leg_pos, LegStateBit *leg_state) |
| 脚の状態を変更する.遊脚を表すビットはそのまま. | |
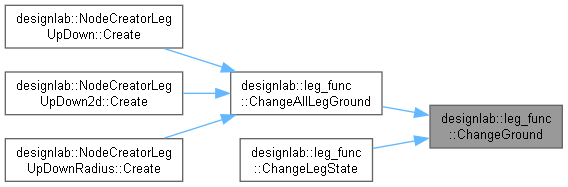
| void | ChangeGround (int leg_index, bool is_ground, LegStateBit *leg_state) |
| 脚の接地・遊脚情報を変更する. | |
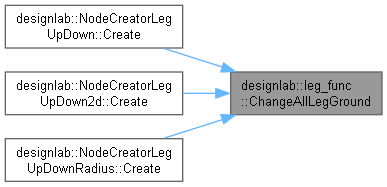
| void | ChangeAllLegGround (const LegGroundedBit &is_ground_list, LegStateBit *leg_state) |
| 全ての脚の接地・遊脚情報を変更する. | |
| void | ChangeDiscreteComPos (enums::DiscreteComPos new_com_pattern, LegStateBit *leg_state) |
| 重心のデータを変更する. | |
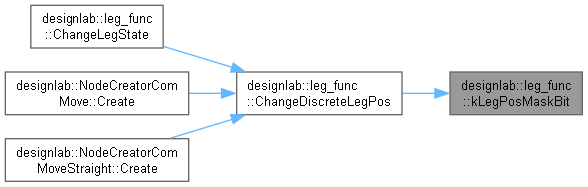
| constexpr LegStateBit | kLegPosMaskBit (0b0111) |
| 脚位置は4bitの下位三桁で管理されるので,そこをマスクする. | |
| constexpr LegStateBit | kLegStateMaskBit (0b1111) |
| 脚状態は4bitで管理されるので,そこをマスクする. | |
変数 | |
| constexpr int | kLegPosBitNum = 4 |
| 脚位置を表すビット数.離散化された脚位置は3bit,遊脚・接地は1bit.あわせて4bit. | |
| constexpr int | kComPosBitNum = 4 |
| 重心パターンを表すビット数. | |
| constexpr int | kLegStateBitNum |
| 脚状態を保存するビット数.28bit. | |
| constexpr int | kShiftToComNum = HexapodConst::kLegNum * 4 |
| 重心パターンを保存するビットまで行くために,どれだけビットをシフトするか. | |
| constexpr LegStateBit | kComStateMaskBit = (0b1111 << kShiftToComNum) |
| 重心パターンを保存するビットをマスクするビット. | |
詳解
このプログラムでは脚状態をビット(28bit)の情報で表す. そのデータを処理するための関数.
脚状態って言ってるけど離散化された重心位置も入ってる.
1脚の脚状態を4bitで表す 最上位0:遊脚,1:接地. 残り3bitで離散化した脚位置.
離散化した脚位置は基準位置を4として,それより前にあるなら4より大きい数字, 後ろにあるならば4より小さい数字.
型定義詳解
◆ LegGroundedBit
| using designlab::leg_func::LegGroundedBit = typedef std::bitset<HexapodConst::kLegNum> |
脚の遊脚・接地を表す型.6bitのビット型.接地が 1 遊脚が 0.
leg_state.h の 58 行目に定義があります。
◆ LegStateBit
| using designlab::leg_func::LegStateBit = typedef std::bitset<kLegStateBitNum> |
脚状態を保存する型.28bitのビット型.
leg_state.h の 55 行目に定義があります。
関数詳解
◆ ChangeAllLegGround()
| void designlab::leg_func::ChangeAllLegGround | ( | const LegGroundedBit & | is_ground_list, |
| LegStateBit * | leg_state | ||
| ) |
全ての脚の接地・遊脚情報を変更する.
- 引数
-
[in] is_ground_list 脚が接地しているかを表す.接地しているならば true. 遊脚しているならば false. [in,out] leg_state 現在の脚状態,これをもとに新しい脚状態を作成する.
leg_state.cpp の 209 行目に定義があります。

◆ ChangeDiscreteComPos()
| void designlab::leg_func::ChangeDiscreteComPos | ( | enums::DiscreteComPos | new_com_pattern, |
| LegStateBit * | leg_state | ||
| ) |
重心のデータを変更する.
- 引数
-
[in] leg_state 現在の脚状態. [in] new_com_pattern 新しい重心パターン.
- 戻り値
- 変更した重心パターンを返す.
leg_state.cpp の 219 行目に定義があります。

◆ ChangeDiscreteLegPos()
| void designlab::leg_func::ChangeDiscreteLegPos | ( | int | leg_index, |
| DiscreteLegPos | new_discretized_leg_pos, | ||
| LegStateBit * | leg_state | ||
| ) |
脚の状態を変更する.遊脚を表すビットはそのまま.
- 引数
-
[in] leg_index 脚の番号.0~5の範囲内でなければアサートで止まる. [in] new_discretized_leg_pos 新しい脚状態. [in,out] leg_state 現在の脚状態,これをもとに新しい脚状態を作成する.
leg_state.cpp の 159 行目に定義があります。

◆ ChangeGround()
| void designlab::leg_func::ChangeGround | ( | int | leg_index, |
| bool | is_ground, | ||
| LegStateBit * | leg_state | ||
| ) |
脚の接地・遊脚情報を変更する.
- 引数
-
[in] leg_index 脚の番号.0~5の範囲内でなければアサートで止まる. [in] is_ground 脚が接地しているかを表す.接地しているならば true. 遊脚しているならば false. [in,out] leg_state 現在の脚状態,これをもとに新しい脚状態を作成する.
leg_state.cpp の 190 行目に定義があります。
◆ ChangeLegState()
| void designlab::leg_func::ChangeLegState | ( | int | leg_index, |
| DiscreteLegPos | new_discretized_leg_pos, | ||
| bool | is_ground, | ||
| LegStateBit * | leg_state | ||
| ) |
脚の情報を変更する.
- 引数
-
[in] leg_index 脚の番号 0~5. [in] new_discretized_leg_pos 新しい脚状態. [in] is_ground 脚が接地しているかを表す.接地しているならば true. 遊脚しているならば false. [in,out] leg_state 現在の脚状態,これをもとに新しい脚状態を作成する.
leg_state.cpp の 145 行目に定義があります。
◆ GetDiscreteComPos()
| enums::DiscreteComPos designlab::leg_func::GetDiscreteComPos | ( | const LegStateBit & | leg_state | ) |
現在の脚状態から重心パターンを取得する.
- 引数
-
[in] leg_state 現在の脚状態.
- 戻り値
- 重心パターンを返す.
leg_state.cpp の 137 行目に定義があります。
◆ GetDiscreteLegPos()
| DiscreteLegPos designlab::leg_func::GetDiscreteLegPos | ( | const LegStateBit & | leg_state, |
| int | leg_index | ||
| ) |
脚状態を取得する.
- 引数
-
[in] leg_state 現在の脚状態. [in] leg_index どの脚の状態を取得するか. 0 ~ 5 の整数で入力する.
- 戻り値
- 離散化された脚の位置を返す.
leg_state.cpp の 123 行目に定義があります。
◆ GetGroundedLegIndexByVector()
| void designlab::leg_func::GetGroundedLegIndexByVector | ( | const LegStateBit & | leg_state, |
| std::vector< int > * | res_index | ||
| ) |
接地している脚の脚番号0~5を,引数で参照渡しする関数.
- 引数
-
[in] leg_state 現在の脚状態. [out] res_index 接地している脚の脚番号を格納する変数.空であること.
leg_state.cpp の 93 行目に定義があります。

◆ GetGroundedLegNum()
| int designlab::leg_func::GetGroundedLegNum | ( | const LegStateBit & | leg_state | ) |
接地している脚の本数を返す関数.
- 引数
-
[in] leg_state 現在の脚状態.
- 戻り値
- 接地している脚の本数.
leg_state.cpp の 75 行目に定義があります。


◆ GetLegGroundedBit()
| LegGroundedBit designlab::leg_func::GetLegGroundedBit | ( | const LegStateBit & | leg_state | ) |
脚が接地しているなら1,遊脚を0としたビット列で遊脚・接地脚の状態を返す.
例えば 0 番脚のみが遊脚しているなら 0b111 110 を返す.
- 引数
-
[in] leg_state 現在の脚状態.
- 戻り値
- 脚が接地しているなら1,遊脚を0としたビット列で遊脚・接地脚の状態を返す.
leg_state.cpp の 61 行目に定義があります。

◆ GetLiftedLegIndexByVector()
| void designlab::leg_func::GetLiftedLegIndexByVector | ( | const LegStateBit & | leg_state, |
| std::vector< int > * | res_index | ||
| ) |
遊脚している脚の脚番号0~5を,引数_res_numberで参照渡しする関数.
- 引数
-
[in] leg_state 現在の脚状態. [out] res_index 遊脚している脚の脚番号を格納する変数.空であること.
leg_state.cpp の 108 行目に定義があります。

◆ GetLiftedLegNum()
| int designlab::leg_func::GetLiftedLegNum | ( | const LegStateBit & | leg_state | ) |
遊脚している脚の本数を返す関数.
- 引数
-
[in] leg_state 現在の脚状態.
- 戻り値
- 遊脚している脚の本数.
leg_state.cpp の 89 行目に定義があります。


◆ IsGrounded()
| bool designlab::leg_func::IsGrounded | ( | const LegStateBit & | leg_state_bit, |
| int | leg_index | ||
| ) |
脚番号 leg_index 0 ~ 5 に応じて,その脚が接地しているかを調べる.
脚は右前脚を0番として,時計回りに0,1,2,3,4,5となる.左前足が5番.
- 引数
-
[in] leg_state_bit 現在の脚状態. [in] leg_index どの脚を調べるか. 0 ~ 5 の整数で入力する.
- 戻り値
-
true 脚が接地している. false 脚が遊脚している.
leg_state.cpp の 46 行目に定義があります。
◆ kLegPosMaskBit()
|
constexpr |
脚位置は4bitの下位三桁で管理されるので,そこをマスクする.
◆ kLegStateMaskBit()
|
constexpr |
脚状態は4bitで管理されるので,そこをマスクする.
◆ MakeLegStateBit()
| LegStateBit designlab::leg_func::MakeLegStateBit | ( | enums::DiscreteComPos | discrete_com_pos, |
| const std::array< bool, HexapodConst::kLegNum > & | is_ground, | ||
| const std::array< DiscreteLegPos, HexapodConst::kLegNum > & | leg_pos | ||
| ) |
脚状態を作成して返す関数.脚状態は重心パターン, 脚の接地・遊脚,離散化した脚位置のデータが含まれる.
- 引数
-
[in] discrete_com_pos どの重心パターンか.詳しくは com_type.h に記述. [in] is_ground 脚が接地しているかを表す bool型の配列. 接地しているならば true.遊脚しているならば false. [in] leg_pos 離散化した脚位置を表す変数.
- 戻り値
- LegStateBit 作成した脚状態を返す.
leg_state.cpp の 14 行目に定義があります。
変数詳解
◆ kComPosBitNum
|
constexpr |
重心パターンを表すビット数.
leg_state.h の 48 行目に定義があります。
◆ kComStateMaskBit
|
constexpr |
重心パターンを保存するビットをマスクするビット.
leg_state.h の 72 行目に定義があります。
◆ kLegPosBitNum
|
constexpr |
脚位置を表すビット数.離散化された脚位置は3bit,遊脚・接地は1bit.あわせて4bit.
leg_state.h の 46 行目に定義があります。
◆ kLegStateBitNum
|
constexpr |
脚状態を保存するビット数.28bit.
leg_state.h の 51 行目に定義があります。
◆ kShiftToComNum
|
constexpr |
重心パターンを保存するビットまで行くために,どれだけビットをシフトするか.
leg_state.h の 69 行目に定義があります。