先行研究における int main()で行われていた処理をまとめたもので, 歩容生成シミュレーションを行うクラス. [詳解]
#include <system_main_simulation.h>
designlab::SystemMainSimulation の継承関係図
designlab::SystemMainSimulation 連携図
公開メンバ関数 | |
| SystemMainSimulation ()=delete | |
| デフォルトコンストラクタは禁止. | |
| SystemMainSimulation (std::unique_ptr< IGaitPatternGenerator > &&gait_pattern_generator_ptr, std::unique_ptr< IMapCreator > &&map_creator_ptr, std::unique_ptr< ISimulationEndChecker > &&simulation_end_checker_ptr, std::unique_ptr< IRobotOperator > &&robot_operator_ptr, std::unique_ptr< NodeInitializer > &&node_initializer_ptr, const std::shared_ptr< GraphicDataBroker > &broker_ptr, const std::shared_ptr< const ApplicationSettingRecord > &setting_ptr, const std::shared_ptr< ResultFileExporter > &result_exporter_ptr) | |
| void | Main () override |
| いままで int mainで行われた処理をまとめたもの. 目標地点へ着くか,歩容計画に失敗した場合に,シミュレーションを終える. また,規定の回数シミュレーションしたら終了する. | |
 基底クラス designlab::ISystemMain に属する継承公開メンバ関数 基底クラス designlab::ISystemMain に属する継承公開メンバ関数 | |
| virtual | ~ISystemMain ()=default |
詳解
先行研究における int main()で行われていた処理をまとめたもので, 歩容生成シミュレーションを行うクラス.
処理の内容を書き換えるときには,int main()から呼ぶクラスを変えるだけでいい.
system_main_simulation.h の 35 行目に定義があります。
構築子と解体子
◆ SystemMainSimulation() [1/2]
|
delete |
デフォルトコンストラクタは禁止.
◆ SystemMainSimulation() [2/2]
| designlab::SystemMainSimulation::SystemMainSimulation | ( | std::unique_ptr< IGaitPatternGenerator > && | gait_pattern_generator_ptr, |
| std::unique_ptr< IMapCreator > && | map_creator_ptr, | ||
| std::unique_ptr< ISimulationEndChecker > && | simulation_end_checker_ptr, | ||
| std::unique_ptr< IRobotOperator > && | robot_operator_ptr, | ||
| std::unique_ptr< NodeInitializer > && | node_initializer_ptr, | ||
| const std::shared_ptr< GraphicDataBroker > & | broker_ptr, | ||
| const std::shared_ptr< const ApplicationSettingRecord > & | setting_ptr, | ||
| const std::shared_ptr< ResultFileExporter > & | result_exporter_ptr | ||
| ) |
- 引数
-
[in] gait_pattern_generator_ptr 自由歩容パターン生成を行うクラス. [in] map_creator_ptr マップを生成するクラス. [in] simulation_end_checker_ptr シミュレーションの終了を判定するクラス. [in] robot_operator_ptr 目標地点を決定するクラス. [in] node_initializer_ptr ノードを初期化するクラス. [in] broker_ptr グラフィックデータを別スレッドに送るための構造体. [in] setting_ptr 設定ファイルの内容を格納する構造体.
system_main_simulation.cpp の 22 行目に定義があります。
関数詳解
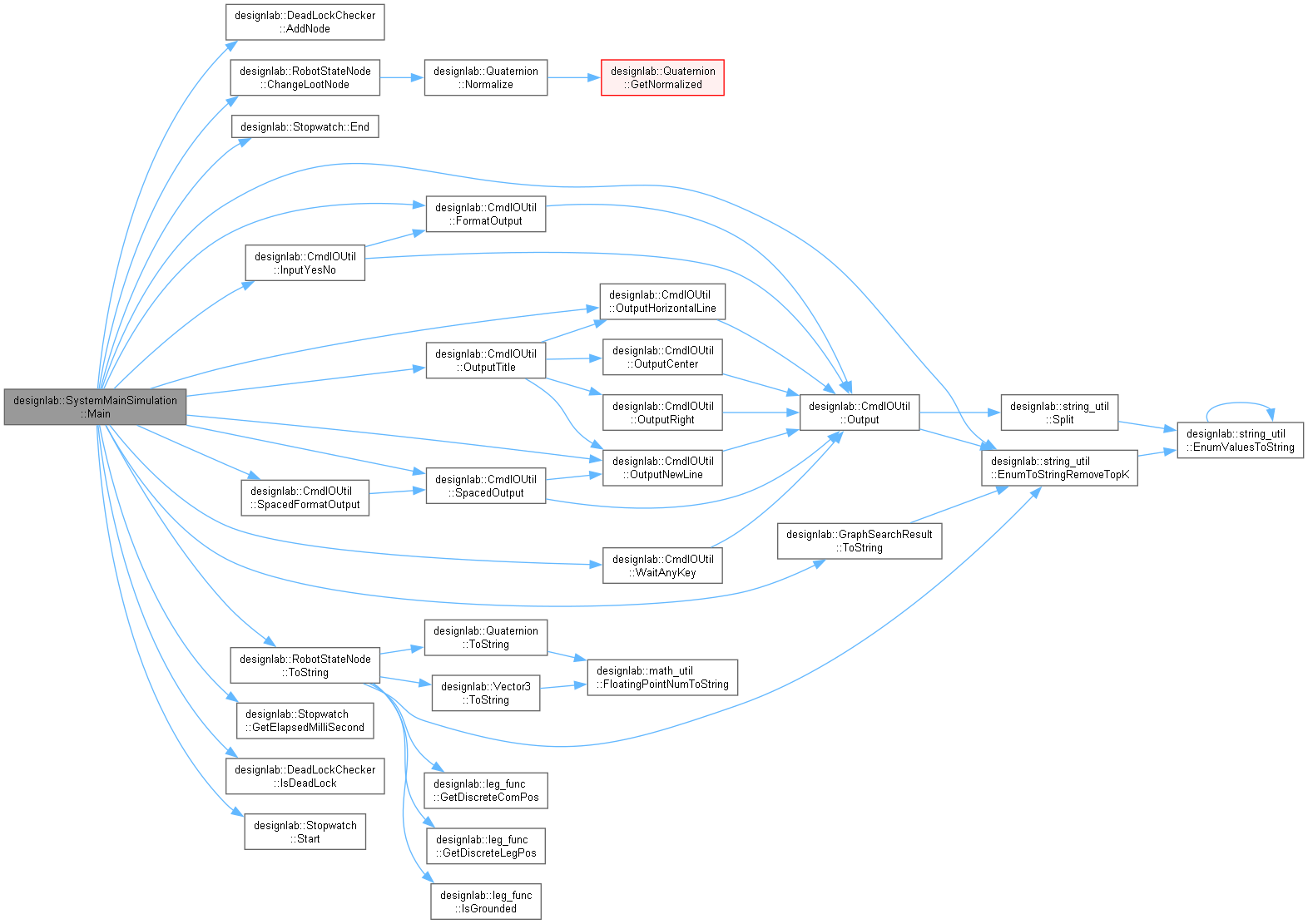
◆ Main()
|
overridevirtual |
いままで int mainで行われた処理をまとめたもの.
目標地点へ着くか,歩容計画に失敗した場合に,シミュレーションを終える.
また,規定の回数シミュレーションしたら終了する.
designlab::ISystemMainを実装しています。
system_main_simulation.cpp の 56 行目に定義があります。
呼び出し関係図:
このクラス詳解は次のファイルから抽出されました:
- DesignLab/system_main_simulation.h
- DesignLab/system_main_simulation.cpp