ノードの初期化を行うクラス.
シミュレーション時にノードの初期値を設定するために使用する.
[詳解]
#include <node_initializer.h>
公開メンバ関数 | |
| NodeInitializer (const Vector3 &pos, const EulerXYZ &posture, HexapodMove move) | |
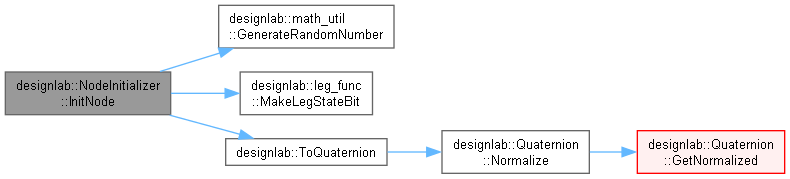
| RobotStateNode | InitNode () const |
| ノードの初期化を行う. | |
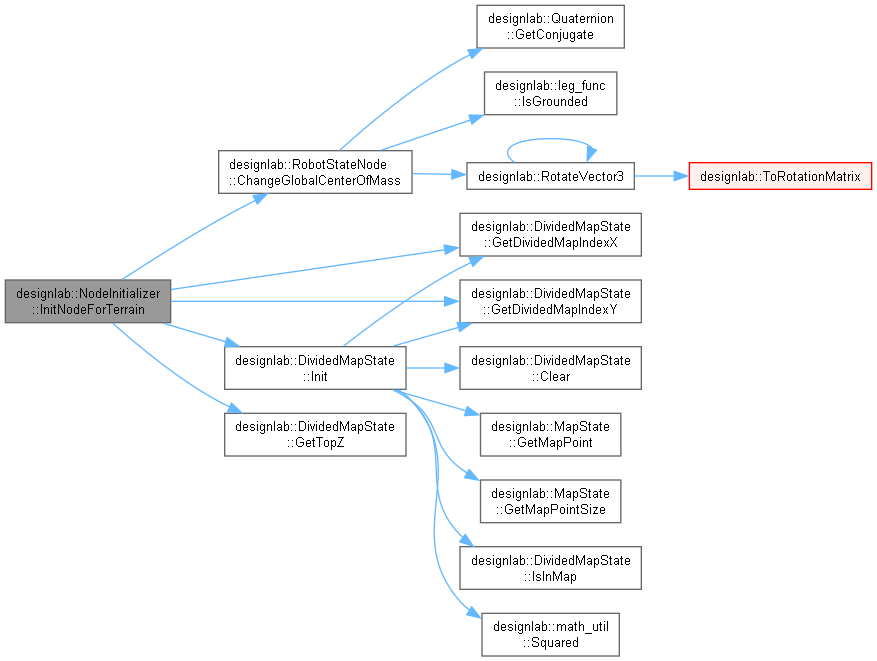
| RobotStateNode | InitNodeForTerrain (const RobotStateNode &node, const MapState map) const |
| 地形に適した初期姿勢を設定する. | |
詳解
ノードの初期化を行うクラス.
シミュレーション時にノードの初期値を設定するために使用する.
node_initializer.h の 19 行目に定義があります。
構築子と解体子
◆ NodeInitializer()
| designlab::NodeInitializer::NodeInitializer | ( | const Vector3 & | pos, |
| const EulerXYZ & | posture, | ||
| HexapodMove | move | ||
| ) |
node_initializer.cpp の 18 行目に定義があります。
関数詳解
◆ InitNode()
| RobotStateNode designlab::NodeInitializer::InitNode | ( | ) | const |
◆ InitNodeForTerrain()
| RobotStateNode designlab::NodeInitializer::InitNodeForTerrain | ( | const RobotStateNode & | node, |
| const MapState | map | ||
| ) | const |
このクラス詳解は次のファイルから抽出されました:
- DesignLab/node_initializer.h
- DesignLab/node_initializer.cpp