マップを表すクラス. [詳解]
#include <map_state.h>
公開メンバ関数 | |
| MapState () | |
| MapState (const std::vector< Vector3 > &map_point) | |
| MapState (const MapState &other)=default | |
| コピーコンストラクタ | |
| MapState (MapState &&other) noexcept=default | |
| ムーブコンストラクタ | |
| MapState & | operator= (const MapState &other)=default |
| 代入演算子 | |
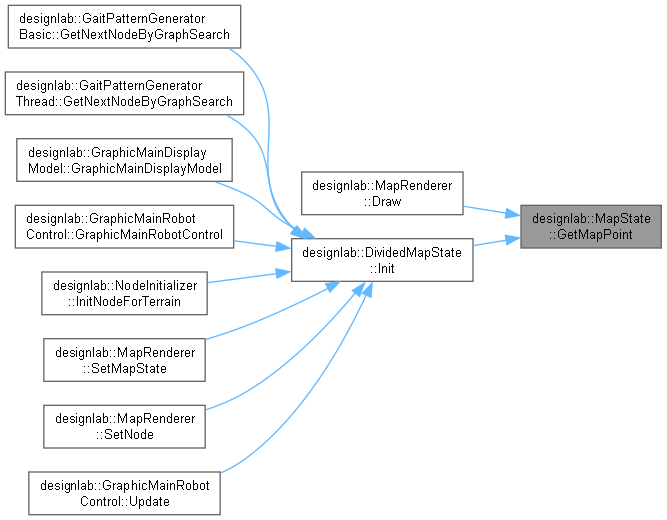
| Vector3 | GetMapPoint (const size_t index) const noexcept |
| 脚設置可能点の座標を返す. | |
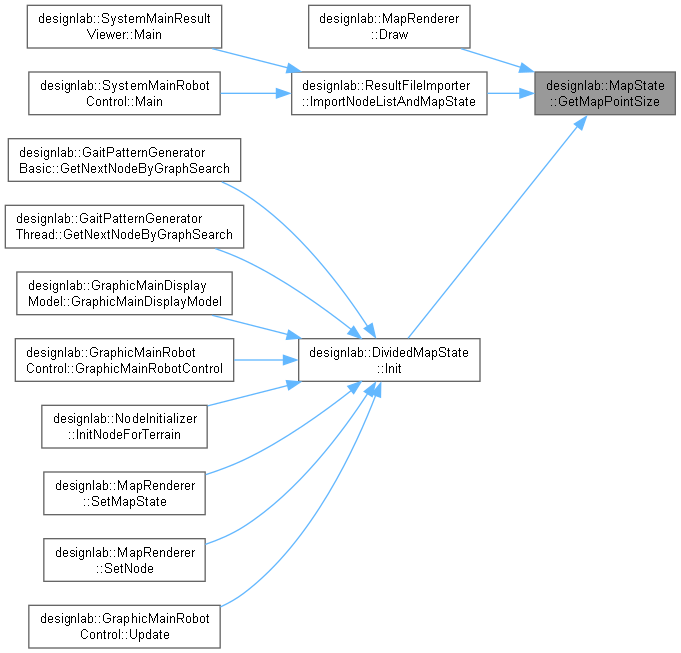
| size_t | GetMapPointSize () const noexcept |
| 脚設置可能点の総数を返す. | |
| void | SetMapPoint (const size_t index, const Vector3 &point) noexcept |
| 脚設置可能点の座標を1つ選び上書きする. 一応作ったけど,使うことはないと思う. 内容を書き換えたいならば Clear した後,AddMapPoint を使うこと. | |
| void | SetMapPointVec (const std::vector< Vector3 > &point) noexcept |
| 脚設置可能点の座標を設定する | |
| void | AddMapPoint (const Vector3 &point) noexcept |
| 脚設置可能点の座標を追加する. | |
| void | ClearMapPoint () noexcept |
| 脚設置可能点の座標を消去する. | |
静的公開変数類 | |
| static constexpr float | kMapPointDistance {20.0f} |
| z軸から(上から)みたとき,格子点状に分けられた脚接地可能点の間隔 [mm]. | |
| static constexpr float | kMapMinZ = {-10000000.0f} |
| マップの最低のZ座標 | |
詳解
マップを表すクラス.
この研究の手法では,ロボットが歩くマップは脚設置可能点の集合で表現される. 面ではなく点の集合.
脚設置可能地点のデータは位置ベクトルの配列で実装している.
実質的に std::vector<Vector3> のラッパークラスといえる. メンバ変数のデータへのアクセスは,メンバ関数のGet関数で行う. 直接データのやり取りを行わないのは,生データであると値を変更可能になってしまうからである. constな関数を使えば,間違っても値の変更ができないので,データのやり取りに優れる.
map_state.h の 29 行目に定義があります。
構築子と解体子
◆ MapState() [1/4]
|
inline |
map_state.h の 31 行目に定義があります。
◆ MapState() [2/4]
|
inlineexplicit |
map_state.h の 32 行目に定義があります。
◆ MapState() [3/4]
|
default |
コピーコンストラクタ
◆ MapState() [4/4]
|
defaultnoexcept |
ムーブコンストラクタ
関数詳解
◆ AddMapPoint()
|
inlinenoexcept |
◆ ClearMapPoint()
|
inlinenoexcept |
脚設置可能点の座標を消去する.
map_state.h の 76 行目に定義があります。
◆ GetMapPoint()
|
inlinenoexcept |
脚設置可能点の座標を返す.
- 引数
-
[in] index 何番目の脚設置可能点の座標を返すか.
範囲外にアクセスした場合,assertで止まる.
- 戻り値
- 脚設置可能点の座標.グローバル座標.
map_state.h の 42 行目に定義があります。
被呼び出し関係図:
◆ GetMapPointSize()
|
inlinenoexcept |
◆ operator=()
◆ SetMapPoint()
|
inlinenoexcept |
脚設置可能点の座標を1つ選び上書きする.
一応作ったけど,使うことはないと思う.
内容を書き換えたいならば Clear した後,AddMapPoint を使うこと.
- 引数
-
[in] index 変更する脚設置可能点の番号.
範囲外にアクセスした場合,assertで止まる.[in] point 脚設置可能点の座標.
map_state.h の 58 行目に定義があります。
◆ SetMapPointVec()
|
inlinenoexcept |
メンバ詳解
◆ kMapMinZ
|
staticconstexpr |
マップの最低のZ座標
map_state.h の 80 行目に定義があります。
◆ kMapPointDistance
|
staticconstexpr |
z軸から(上から)みたとき,格子点状に分けられた脚接地可能点の間隔 [mm].
map_state.h の 79 行目に定義があります。
このクラス詳解は次のファイルから抽出されました:
- DesignLab/map_state.h