ロボットの回転を表すノードを生成するクラス. [詳解]
#include <node_creator_body_rot.h>
designlab::NodeCreatorBodyRot の継承関係図
designlab::NodeCreatorBodyRot 連携図
公開メンバ関数 | |
| NodeCreatorBodyRot (const DividedMapState &devide_map, const std::shared_ptr< const IHexapodCoordinateConverter > &converter_ptr, const std::shared_ptr< const IHexapodPostureValidator > &checker_ptr, const Vector3 &rot_axis, HexapodMove next_move) | |
| ~NodeCreatorBodyRot ()=default | |
| void | Create (const RobotStateNode ¤t_node, int current_num, std::vector< RobotStateNode > *output_graph) const override |
| 現在のノードから次のノード群を生成する. | |
 基底クラス designlab::INodeCreator に属する継承公開メンバ関数 基底クラス designlab::INodeCreator に属する継承公開メンバ関数 | |
| INodeCreator ()=default | |
| コンストラクタでは次動作を設定する.またマップのポインタを受け取る. | |
| virtual | ~INodeCreator ()=default |
詳解
ロボットの回転を表すノードを生成するクラス.
node_creator_body_rot.h の 24 行目に定義があります。
構築子と解体子
◆ NodeCreatorBodyRot()
| designlab::NodeCreatorBodyRot::NodeCreatorBodyRot | ( | const DividedMapState & | devide_map, |
| const std::shared_ptr< const IHexapodCoordinateConverter > & | converter_ptr, | ||
| const std::shared_ptr< const IHexapodPostureValidator > & | checker_ptr, | ||
| const Vector3 & | rot_axis, | ||
| HexapodMove | next_move | ||
| ) |
node_creator_body_rot.cpp の 12 行目に定義があります。
◆ ~NodeCreatorBodyRot()
|
default |
関数詳解
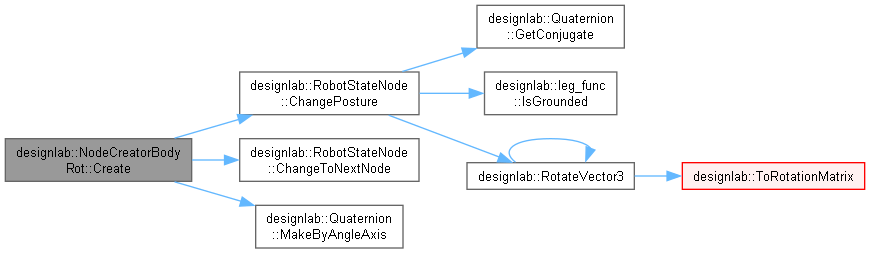
◆ Create()
|
overridevirtual |
現在のノードから次のノード群を生成する.
- 引数
-
[in] current_node 現在のノード. [in] current_node_index 現在のノードのインデックス. [out] output_graph 生成したノード群を返す.
designlab::INodeCreatorを実装しています。
node_creator_body_rot.cpp の 23 行目に定義があります。
呼び出し関係図:
このクラス詳解は次のファイルから抽出されました:
- DesignLab/node_creator_body_rot.h
- DesignLab/node_creator_body_rot.cpp