グラフ探索の結果を格納する構造体. [詳解]
#include <graph_search_result_record.h>
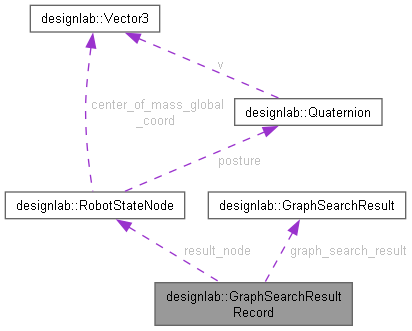
designlab::GraphSearchResultRecord 連携図
公開メンバ関数 | |
| GraphSearchResultRecord () | |
| GraphSearchResultRecord (const RobotStateNode &node, const double time, const GraphSearchResult result) | |
| std::string | ToCsvString () const |
| 構造体の内容をCSV形式の文字列にして返す. , (カンマ) で区切られる. | |
静的公開メンバ関数 | |
| static std::string | GetCsvHeader () |
| CSV形式のヘッダを返す. | |
公開変数類 | |
| RobotStateNode | result_node |
| グラフ探索によって選択されたノード. | |
| double | computation_time |
| グラフ探索にかかった計算時間 [milli sec] | |
| GraphSearchResult | graph_search_result |
| グラフ探索の結果,成功か失敗か. | |
詳解
構築子と解体子
◆ GraphSearchResultRecord() [1/2]
|
inline |
graph_search_result_record.h の 63 行目に定義があります。
◆ GraphSearchResultRecord() [2/2]
|
inline |
graph_search_result_record.h の 70 行目に定義があります。
関数詳解
◆ GetCsvHeader()
|
static |
CSV形式のヘッダを返す.
- 戻り値
- CSV形式のヘッダ.
- todo:
- 処理を一般化する.
graph_search_result_record.cpp の 67 行目に定義があります。
被呼び出し関係図:

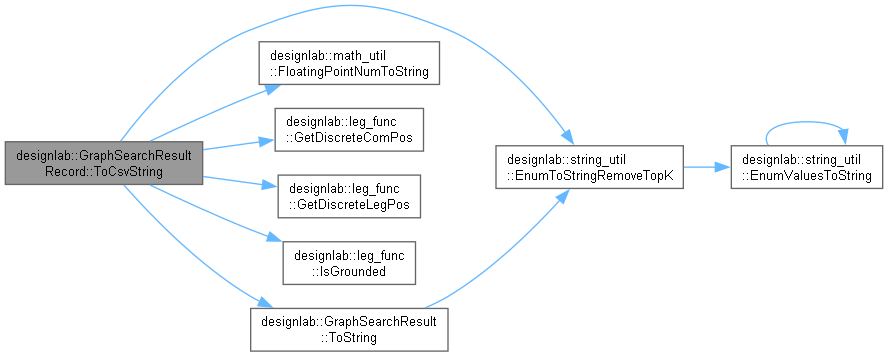
◆ ToCsvString()
| std::string designlab::GraphSearchResultRecord::ToCsvString | ( | ) | const |
構造体の内容をCSV形式の文字列にして返す. , (カンマ) で区切られる.
- 戻り値
- 構造体の内容をCSV形式の文字列にしたもの.
graph_search_result_record.cpp の 23 行目に定義があります。
呼び出し関係図:
メンバ詳解
◆ computation_time
| double designlab::GraphSearchResultRecord::computation_time |
グラフ探索にかかった計算時間 [milli sec]
graph_search_result_record.h の 90 行目に定義があります。
◆ graph_search_result
| GraphSearchResult designlab::GraphSearchResultRecord::graph_search_result |
グラフ探索の結果,成功か失敗か.
graph_search_result_record.h の 92 行目に定義があります。
◆ result_node
| RobotStateNode designlab::GraphSearchResultRecord::result_node |
グラフ探索によって選択されたノード.
graph_search_result_record.h の 88 行目に定義があります。
この構造体詳解は次のファイルから抽出されました:
- DesignLab/graph_search_result_record.h
- DesignLab/graph_search_result_record.cpp