DxLibのGuiやRendererでノードのセットを行うためのインターフェース. [詳解]
#include <interface_dxlib_node_setter.h>
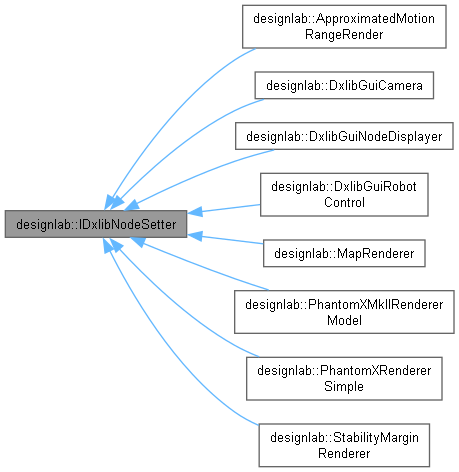
designlab::IDxlibNodeSetter の継承関係図
公開メンバ関数 | |
| virtual | ~IDxlibNodeSetter ()=default |
| virtual void | SetNode (const RobotStateNode &node)=0 |
| ノードをセットする. | |
詳解
DxLibのGuiやRendererでノードのセットを行うためのインターフェース.
interface_dxlib_node_setter.h の 19 行目に定義があります。
構築子と解体子
◆ ~IDxlibNodeSetter()
|
virtualdefault |
関数詳解
◆ SetNode()
|
pure virtual |
ノードをセットする.
- 引数
-
node ノード番号.
designlab::ApproximatedMotionRangeRender, designlab::DxlibGuiCamera, designlab::DxlibGuiNodeDisplayer, designlab::DxlibGuiRobotControl, designlab::PhantomXMkIIRendererModel, designlab::PhantomXRendererSimple, designlab::StabilityMarginRenderer, designlab::MapRendererで実装されています。
このクラス詳解は次のファイルから抽出されました:
- DesignLab/interface_dxlib_node_setter.h