ロボットの静的安定余裕(支持脚多角形)を描画するクラス. [詳解]
#include <stability_margin_renderer.h>
designlab::StabilityMarginRenderer の継承関係図
designlab::StabilityMarginRenderer 連携図
公開メンバ関数 | |
| StabilityMarginRenderer (const std::shared_ptr< const IHexapodCoordinateConverter > &converter_ptr) | |
| ~StabilityMarginRenderer ()=default | |
| void | SetNode (const RobotStateNode &node) override |
| ノードをセットする. | |
| void | Draw () const override |
| 描画処理を行う. const 関数にしているのは, 描画処理の中でメンバ変数を変更しないようにするため. | |
 基底クラス designlab::IDxlib3dRenderer に属する継承公開メンバ関数 基底クラス designlab::IDxlib3dRenderer に属する継承公開メンバ関数 | |
| virtual | ~IDxlib3dRenderer ()=default |
| 基底クラス designlab::IDxlibNodeSetter に属する継承公開メンバ関数 | |
| virtual | ~IDxlibNodeSetter ()=default |
詳解
ロボットの静的安定余裕(支持脚多角形)を描画するクラス.
接地点を投影した多角形の内部に,重心が入っているかどうかで安定性を判定する. Stability Margin で調べると詳しい説明が出てくる.
stability_margin_renderer.h の 27 行目に定義があります。
構築子と解体子
◆ StabilityMarginRenderer()
| designlab::StabilityMarginRenderer::StabilityMarginRenderer | ( | const std::shared_ptr< const IHexapodCoordinateConverter > & | converter_ptr | ) |
stability_margin_renderer.cpp の 22 行目に定義があります。
◆ ~StabilityMarginRenderer()
|
default |
関数詳解
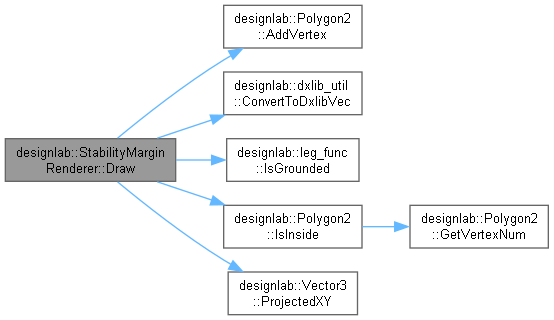
◆ Draw()
|
overridevirtual |
描画処理を行う. const 関数にしているのは, 描画処理の中でメンバ変数を変更しないようにするため.
designlab::IDxlib3dRendererを実装しています。
stability_margin_renderer.cpp の 32 行目に定義があります。
呼び出し関係図:
◆ SetNode()
|
inlineoverridevirtual |
ノードをセットする.
- 引数
-
node ノード番号.
designlab::IDxlibNodeSetterを実装しています。
stability_margin_renderer.h の 36 行目に定義があります。
このクラス詳解は次のファイルから抽出されました:
- DesignLab/stability_margin_renderer.h
- DesignLab/stability_margin_renderer.cpp