探索において目標となる座標や角度,評価する値についてまとめた構造体. [詳解]
#include <robot_operation.h>
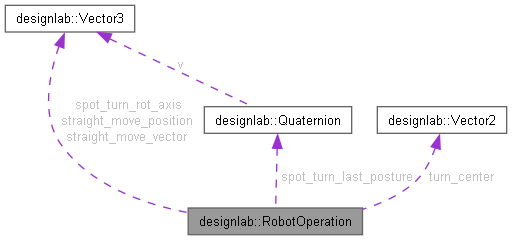
designlab::RobotOperation 連携図
公開変数類 | |
| Vector3 | straight_move_vector {1.f, 0.f, 0.f} |
| < 目標方向.正規化されたベクトル. | |
| Vector3 | straight_move_position {10000.f, 0.f, 0.f} |
| 目標姿勢 ( posture ) | |
| Quaternion | spot_turn_last_posture |
| 旋回時の回転軸.右ねじの回転. | |
| Vector3 | spot_turn_rot_axis {Vector3::GetUpVec()} |
| Vector2 | turn_center {0.f, 0.f} |
| 旋回中心. | |
| float | turn_radius {1000.f} |
| 旋回半径. | |
| bool | turn_clockwise {true} |
| 旋回方向. | |
| RobotOperationType | operation_type {kStraightMovePosition} |
詳解
メンバ詳解
◆ operation_type
| RobotOperationType designlab::RobotOperation::operation_type {kStraightMovePosition} |
robot_operation.h の 68 行目に定義があります。
◆ spot_turn_last_posture
| Quaternion designlab::RobotOperation::spot_turn_last_posture |
初期値:
{
static Quaternion MakeByAngleAxis(float rad_angle, const Vector3 &axis)
回転軸と回転角からクォータニオンを作成する. q = cos(θ/2) * w + sin(θ/2) * { v.x + v.y + v.z } となる. ノルムは必ず1になる.
Definition math_quaternion.cpp:31
static constexpr Vector3 GetUpVec() noexcept
上に進む単位ベクトルを返す. 静的な関数なので,Vector3::GetUpVec() と呼び出せる.
Definition math_vector3.h:223
旋回時の回転軸.右ねじの回転.
robot_operation.h の 55 行目に定義があります。
◆ spot_turn_rot_axis
| Vector3 designlab::RobotOperation::spot_turn_rot_axis {Vector3::GetUpVec()} |
robot_operation.h の 59 行目に定義があります。
◆ straight_move_position
| Vector3 designlab::RobotOperation::straight_move_position {10000.f, 0.f, 0.f} |
目標姿勢 ( posture )
robot_operation.h の 52 行目に定義があります。
◆ straight_move_vector
| Vector3 designlab::RobotOperation::straight_move_vector {1.f, 0.f, 0.f} |
◆ turn_center
| Vector2 designlab::RobotOperation::turn_center {0.f, 0.f} |
旋回中心.
robot_operation.h の 61 行目に定義があります。
◆ turn_clockwise
| bool designlab::RobotOperation::turn_clockwise {true} |
◆ turn_radius
| float designlab::RobotOperation::turn_radius {1000.f} |
旋回半径.
robot_operation.h の 63 行目に定義があります。
この構造体詳解は次のファイルから抽出されました:
- DesignLab/robot_operation.h