協働作業のための軌道生成
協働作業のための軌道生成
概要
現在,大学院で協働作業のための軌道生成に関する研究を行っています.
協働作業とは人間とロボットが協力して作業を行うことを指します.
なかでも,作業空間や作業時間を共有することが特徴です.
人間とロボットが協働することで,作業の柔軟性や効率性が向上すると期待されています.
しかし,人間とロボットの作業空間を共有するため,接触のリスクが高く,人間の安全性を確保することが課題です.
そこで,本研究では人間との接触を回避しつつ,協働作業を行うための軌道生成手法を提案しています.
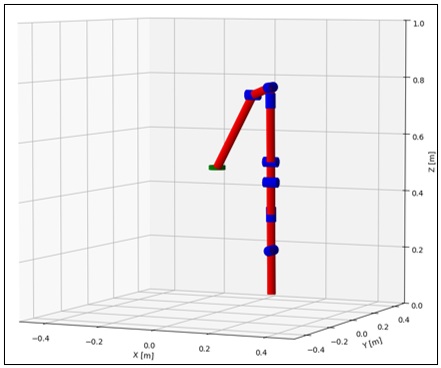
具体的には,人間との接触のリスクを定式化し,最適化問題の制約条件として組み込むことで,接触を回避する関節角軌道を生成します.
提案手法の新規性として,接触のリスクを定量的に評価している点が挙げられます.
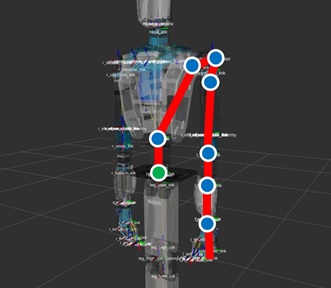
リスク評価は人間の掃引空間(sweep space)から行っております.
掃引空間とは,人間の手や体が移動した範囲を表す空間であり,
本研究においては,人間との接触のリスクが高い領域を特定するために用います.
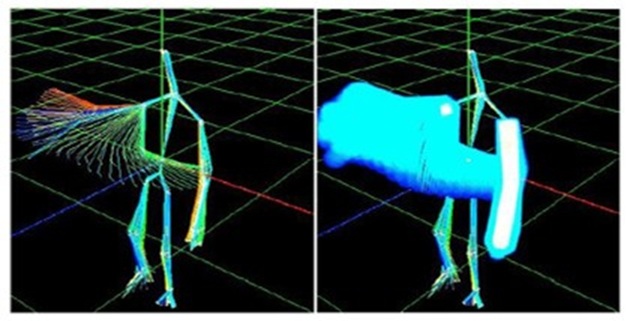
人間の掃引空間